research note
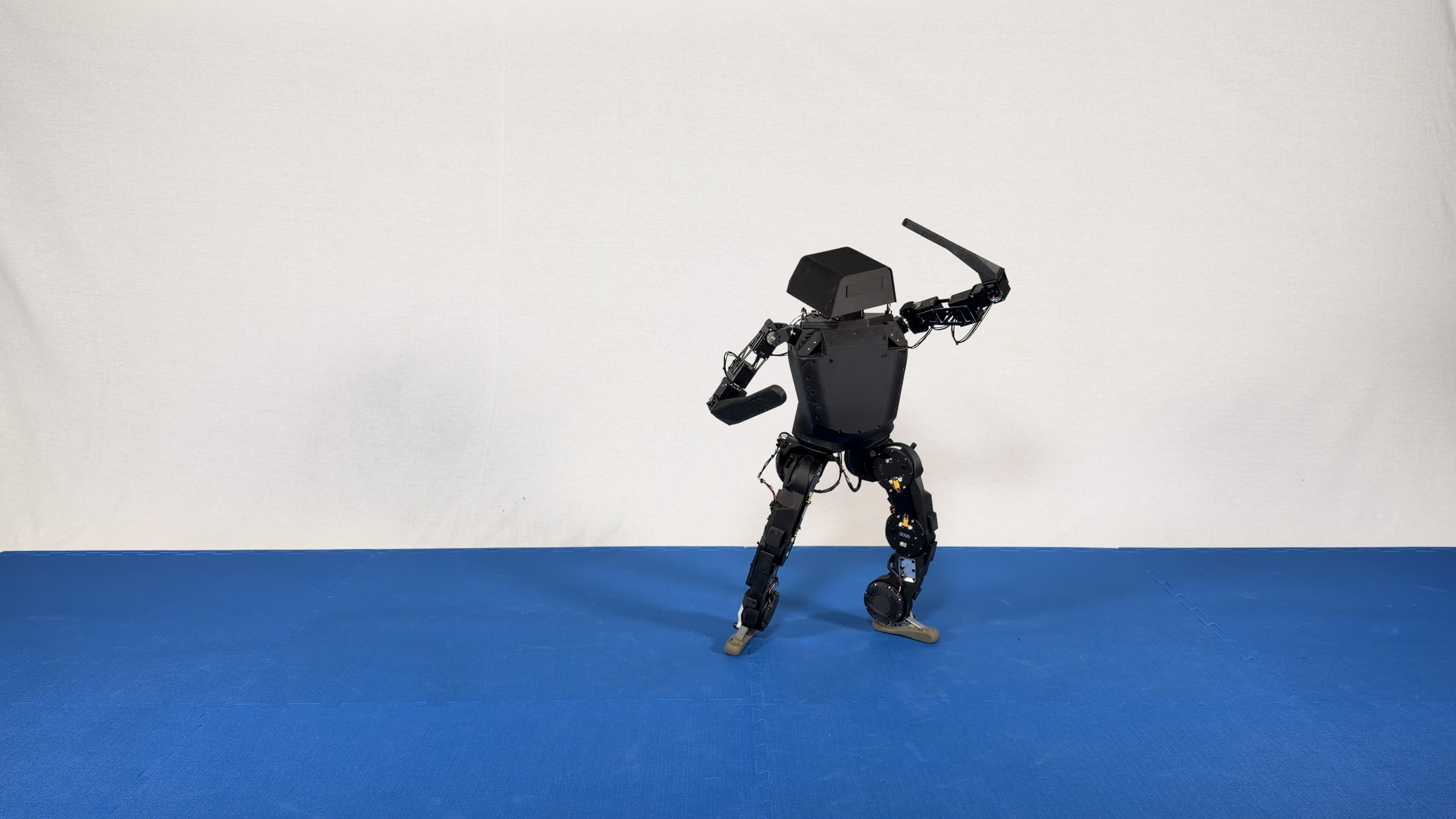
CoCo-InEKF: State Estimation with Learned Contact Covariances in Dynamic, Contact-Rich Scenarios
This paper addresses the challenge of accurate proprioceptive state estimation for legged robots executing highly dynamic and contact-rich motions