
Shape Sensing of Continuum Robots using Direct Laser Writing
Source: arXiv:2606.19265 · Published 2026-06-17 · By Amber K. Rothe, Nidhi Malhotra, Jaydev P. Desai
TL;DR
This paper addresses the challenge of accurately sensing the shape and bending angle of continuum robots, which are highly compliant and flexible, making shape estimation difficult. Traditional methods have limitations such as fragility, complexity, or electromagnetic interference. The authors propose a novel approach that uses direct laser writing (DLW) to fabricate graphene-based strain sensors monolithically on polyimide notched-tube continuum joints, enabling integrated sensing and actuation structures with a streamlined fabrication process. They characterize these DLW sensors using both linear and nonlinear hysteresis models, achieving joint angle prediction errors as low as 1.76° and demonstrate closed-loop control with angle tracking errors below 3°. A feasibility demonstration inside a hydrogel phantom further validates their method for minimal-invasive surgical applications.
Key findings
- DLW strain sensors integrated directly with continuum robot joints yield joint angle prediction RMSE as low as 1.76° (Joint A) using a Prandtl-Ishlinskii hysteresis model.
- Linear models achieve angle estimation RMSE between 2.76° to 5.25° depending on the joint design.
- Combining readings from two sensors on bidirectional symmetric notch (BSN) joints reduces angle estimation RMSE to 3.13°, better than single sensor alone (5.25° and 3.84° separately).
- Closed-loop control of a robotic joint using DLW sensor feedback reduces actual vs desired angle error from 8.14° (open loop) to 2.92° RMSE.
- Rate dependence experiments showed negligible correlation (<0.01) between tendon stroke speed and sensor gauge factor, indicating minimal speed effects on sensor response.
- Sensor relaxation (creep) was observed in joint angle under constant tendon stroke, but corresponding sensor resistance changes were minimal and poorly correlated (correlation coefficient 0.118) to strain relaxation.
- DLW sensors demonstrated robustness and functionality inside a tissue-mimicking hydrogel phantom with angle estimation errors in the range 4.18° to 8.17° RMSE across trials.
- The fabrication process uses a single laser micromachining system for both sensor patterning and notch cutting, eliminating assembly errors and reducing fabrication complexity.
Threat model
n/a — The paper focuses on sensing technology and closed-loop control for continuum surgical robots, not addressing adversarial threat scenarios or bot-defense.
Methodology — deep read
Threat Model & Assumptions: The adversary context is not explicitly security-focused; the work targets sensing shape in continuum surgical robots assuming a high-noise, flexible environment where external imaging and electromagnetic sensing have limitations. The key assumption is that integrated strain sensing with high resolution, miniaturization, and low fabrication complexity can improve shape estimation accuracy.
Data: Experiments were performed on three types of continuum joints (Joint A, B, C) fabricated from polyimide tubing with integrated DLW strain gauges. Joint dimensions and notch styles are described (unidirectional asymmetric notch - UAN, and bidirectional symmetric notch - BSN). Data included sensor resistance derived from voltage divider circuits and tendon actuation stroke measured via encoders. Ground truth joint bending angles were recorded with an electromagnetic tracker outside tissue, and fluoroscopy inside a hydrogel phantom. Data sampling was at 500 Hz. Multiple cyclic loading profiles and random actuation patterns over durations up to 3000 seconds were used.
Architecture/Algorithm: The sensor transcribes strain into resistance changes. Two models were fit to characterize sensor resistance-strain relationship: a linear model using gauge factor (GF) to relate strain ε to resistance R, and a nonlinear, hysteresis-capable Prandtl-Ishlinskii (PI) model to capture nonlinearity and hysteresis effects observed in DLW sensors. PI model uses multiple play operators combined with hyperbolic tangent nonlinearities, and employs nonlinear optimization to fit weights and radii parameters, enabling forward and inverse model estimation of strain and angle from measured resistance. For joints with two sensors, separate linear models were fit and combined in an analytical formula to improve angle estimation accuracy.
Training Regime: Model fitting involved regression for linear models and nonlinear optimization for PI models with order N=10 for hysteresis characterization (N=3 in closed-loop control example for simplification). Initial parameter guesses for optimization were derived from empirical sensor response peaks. Models were centered around unstrained resistance values and strain offsets. Filtering (moving average of 500 and 1000 samples) was applied to raw sensor voltage signals to reduce noise prior to modeling.
Evaluation Protocol: Evaluation was based on root mean square error (RMSE) between sensor-predicted joint angles and ground truth from EM tracker or fluoroscopy images. Experiments included: i) sensor characterization with cyclic loading to study resistance-strain hysteresis, ii) rate dependence tests varying actuation speed to check sensor response, iii) relaxation experiments holding tendon stroke constant to observe viscoelastic effects, iv) angle estimation accuracy on different joints for single and dual sensor configurations, and v) closed-loop control tests using sensor feedback for tracking desired joint angles. The hydrogel phantom test assessed sensor performance in a simulated physiological environment. Statistical correlation coefficients were computed for rate and relaxation studies.
Reproducibility: The paper does not mention public code or data release. The fabrication procedure is fully detailed with laser parameters, software tools, and materials descriptions, enabling replication by specialized labs. Model fitting relies on standard regression and optimization methods. The dataset appears proprietary given the specialized hardware and materials.
A concrete example end-to-end: For Joint A, tendon actuation was applied using repetitive cyclic patterns at 500 Hz data rate. Sensor voltages were recorded and converted to resistance via voltage divider equations. Resistance vs strain curves showed pronounced hysteresis, motivating use of PI model. After model fitting, inverse PI model predicted strain and joint angle with RMSE of 1.76°. Using this prediction for closed-loop control of joint bending reduced tracking error to within 3°, demonstrating effective sensor integration from fabrication through sensing to control.
Technical innovations
- Integration of direct laser writing (DLW) graphene-based strain sensors and continuum joint fabrication in one monolithic process using a single laser setup.
- Application of generalized Prandtl-Ishlinskii hysteresis model to accurately characterize nonlinear and hysteretic resistance-strain behavior of DLW sensors on flexible continuum joints.
- Use of dual-sensor configurations on bidirectional symmetric notch joints to improve angle estimation accuracy by combining sensor readings.
- Demonstration of closed-loop control incorporating DLW sensor feedback achieving under 3° tracking errors in robotic joint angle control.
Datasets
- Custom continuum robot tendon actuation dataset with EM tracker ground truth — approximately 3000 seconds, 500 Hz sampling — proprietary experimental setup
- Hydrogel phantom navigation trials with fluoroscopic ground truth — 3 trials with repeated bending motions — proprietary
Baselines vs proposed
- Linear model angle estimation RMSE: Joint A = 2.76°, Joint B = 3.51°, Joint C = 5.25° vs PI model: Joint A = 1.76°, Joint B = 2.65°, Joint C = 7.57°
- Two-sensor combined linear model for Joint C: RMSE = 3.13° vs single sensor in tension RMSE = 5.25°, sensor in compression RMSE = 3.84°
- Open-loop control tracking error RMSE = 8.14° vs closed-loop with DLW sensor feedback RMSE = 2.92°
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2606.19265.

Fig 1: Schematic showing the design for (a) Joint A, (b) Joint B, and (c)

Fig 2: The sensing joint fabrication process (a) begins with stock polyimide

Fig 3: Schematic of the notch cross section for UAN and BSN designs.

Fig 4: Data for the sensor characterization experiment. (a) The tendon
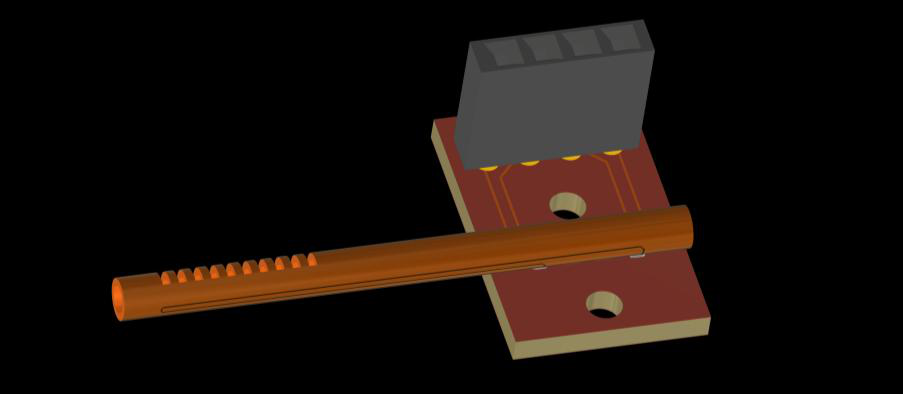
Fig 5 (page 2).
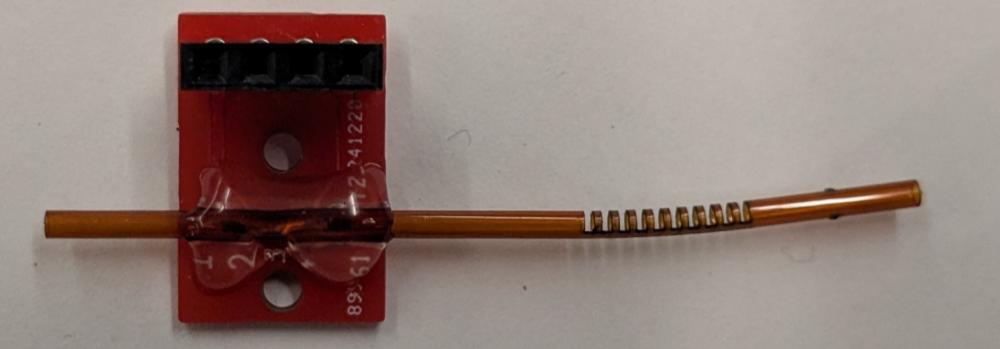
Fig 6 (page 2).

Fig 7 (page 2).
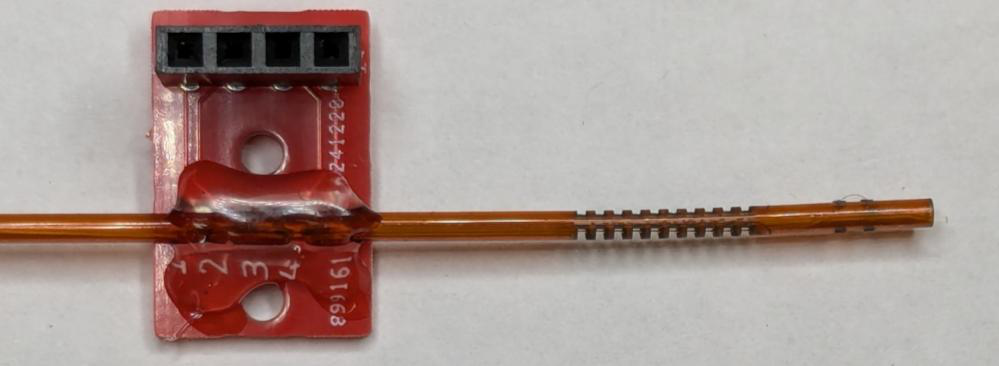
Fig 8 (page 2).
Limitations
- Sensing range is limited due to saturation observed below 2% strain, limiting maximum bend sensing capability.
- Relaxation (creep) of joints changes strain under static tendon stroke but sensor resistance shows poor correlation to relaxation, potentially missing viscoelastic effects.
- Temperature dependence and long-term durability of DLW sensors under clinical conditions were not investigated.
- Noise in sensor signals requires aggressive filtering (moving averages of 500–1000 samples), which may reduce temporal resolution.
- Current models and experiments do not evaluate performance under harsh operating room electromagnetic interference or patient-induced disturbances.
- No open-source code or publicly available dataset limits immediate reproducibility.
Open questions / follow-ons
- How robust are the DLW sensors to temperature variations and mechanical fatigue over prolonged clinical use?
- Can the sensor fabrication process be scaled or adapted for smaller-diameter continuum robots like catheters?
- How does the sensor perform under realistic in situ surgical conditions with biological tissue contact and fluid exposure?
- Can more advanced nonlinear or data-driven models improve angle estimation accuracy and reduce filtering requirements?
Why it matters for bot defense
While this paper is not directly linked to CAPTCHA or bot defense, its advances in miniaturized, robust strain sensing with nonlinear modeling have parallels in sensor fusion and real-time feedback systems. Bot-defense engineers interested in reliable, low-latency sensing and control of flexible robotic components might find the integration of hysteresis modeling and monolithic fabrication useful analogies for designing hardened sensing elements in physical challenge-response systems. The closed-loop control enabled by accurate on-board sensing also exemplifies how integrated sensors can improve actuator reliability and reduce error, a principle applicable in malicious bot detection where precise signal interpretation is critical.
Cite
@article{arxiv2606_19265,
title={ Shape Sensing of Continuum Robots using Direct Laser Writing },
author={ Amber K. Rothe and Nidhi Malhotra and Jaydev P. Desai },
journal={arXiv preprint arXiv:2606.19265},
year={ 2026 },
url={https://arxiv.org/abs/2606.19265}
}