
A Distributed Multi-UGV Exploration Framework With Loop-Aware Planning and Descriptor-Aided Localization in Resource-Limited Environments
Source: arXiv:2606.11088 · Published 2026-06-09 · By Zhiwei Li, Haiou Liu, Xijun Zhao, Ji Li, Yingze Wang, Boyang Wang
TL;DR
This paper addresses the challenge of robust and efficient cooperative exploration by multiple unmanned ground vehicles (UGVs) operating in unknown, GPS-denied, and communication-constrained environments without prior maps. The main problem is that localization drift and inconsistent maps degrade multi-UGV coordination and cause redundant area coverage. The authors propose a fully distributed exploration framework that tightly couples descriptor-aided cross-UGV loop closure with a loop-aware hierarchical planning strategy. The key novelty is a lightweight, viewpoint-invariant LiDAR global descriptor with spectral-guided range-image prealignment, enabling reliable cross-UGV place recognition under significant yaw and lateral variations. Verified loop closures maintain globally consistent trajectories and a sparse topological representation. An uncertainty-aware loop-closure selection module scores candidate loop closures under pose uncertainty, retaining only the highest utility loops as anchors for global task allocation and local path refinement. Extensive simulation and real-robot experiments across benchmark datasets show the proposed descriptor achieves average recall (AR@1/AR@1%) of 89.9%/95.5%, substantially outperforming popular baselines under diverse viewpoint shifts. The distributed pose graph optimization reduces absolute trajectory error (ATE) significantly compared to other SLAM systems. The integrated loop-aware hierarchical planning improves exploration efficiency, reducing exploration time by 15.4% and travel distance by 14.3% relative to a multi-traveling salesman problem (mTSP) baseline, while also cutting communication load. Overall, the framework enables accurate and resource-efficient distributed multi-UGV exploration with tightly coupled localization, mapping, and planning.
Key findings
- The proposed LiDAR descriptor achieves mean AR@1/AR@1% of 89.9%/95.5% across 5 challenging sequences from KITTI and Mulran datasets, outperforming Scan Context++ (72.4%/82.4%), OverlapTransformer (80.7%/92.7%), and LiDAR-Iris (84.6%/91.0%). (Table I)
- Absolute Trajectory Error (ATE) is reduced by a factor of 2-3x compared to Fast-LIO2, DCL-SLAM, DiSCo-SLAM, and Kimera-Multi baselines across four real and simulated scenarios. For example, in the Library scenario, mean ATE per UGV is 0.45m vs >1.3m for others. (Table II)
- Communication bandwidth use is substantially reduced by exchanging descriptors and sparse topological subgraphs instead of dense point clouds; total bandwidth for 3 UGVs remains under ~100KB/s during exploration. (Table V)
- The loop-aware hierarchical planning method reduces overall exploration time by 15.4% and travel distance by 14.3% relative to an mTSP baseline, also reducing loop-induced path overlap by over 50%. (Table VI)
- The system maintains stable localization and mapping performance with network delays up to 3s and bandwidth caps as low as 0.6Mbps, though performance degrades beyond those thresholds. (Tables III and IV)
- Scaling from 3 to 6 UGVs increases communication and computation costs moderately, with global optimization time growing most due to added loop constraints. (Table V)
- Coupling loop closure selection with global MDVRP and local TSP planners improves spatial coordination, workload balance, and exploration robustness compared to treating loops as passive constraints.
Threat model
The system considers a natural operational threat model where multiple independent UGVs explore unknown GPS-denied environments with severe viewpoint and lateral offset changes. The adversary is environmental and systemic noise causing localization drift and map inconsistency. No centralized infrastructure or global reference is available. The framework assumes no malicious agents; communication is limited but trusted, and the adversary cannot inject false data or block communications deliberately.
Methodology — deep read
Threat Model and Assumptions: The adversary is not explicitly defined, but the system assumes harsh operational constraints typical in field robotics: unknown GPS-denied environments without prior maps, limited and unreliable communication bandwidth, and multiple autonomous UGV agents. The framework does not rely on centralized infrastructure or absolute global references. The main challenge is localization drift caused by viewpoint variations and pose uncertainty, which the system mitigates through distributed loop closure detection and pose graph optimization.
Data: Provenance, size, labels, splits, preprocessing: Evaluation datasets include five sequences from the publicly available KITTI and Mulran datasets to benchmark loop closure detection under challenging viewpoint shifts. Four scenarios are used to assess localization accuracy: two from the open S3E benchmark, and two real-world large-scale industrial and suburban environments collected by the authors. The system is also validated in simulation using Gazebo and deployed on physical UGV platforms equipped with 3D LiDARs (16- and 64-beam), IMUs, and onboard computing. LiDAR scans are converted to spherical range images and aligned via spectral-saliency prealignment. Keyframes, descriptors, and pose graphs are incrementally built.
Architecture/Algorithm: The proposed system consists of two tightly coupled modules: (A) Distributed Localization and Mapping and (B) Hierarchical Planning.
A. Localization and Mapping:
- Viewpoint-invariant LiDAR global descriptor extraction: inputs are prealigned range images canonically shifted by azimuth saliency to handle large yaw and lateral drift. A 4-stage local Swin Transformer encodes multi-scale features fused by a feature pyramid and refined with MLP feature mixing, producing a compact 256-D descriptor.
- Loop closure detection: Each UGV maintains a local KD-tree of descriptors. New keyframe descriptors query peer UGVs’ KD-trees. Matches passing similarity gating are verified via Fast-GICP registration of raw point clouds. Verified inter-UGV loop closures are incorporated asynchronously into a decentralized pose graph optimized via iSAM2.
- Sparse topological mapping: Locally, environments are voxelized and traversable voxel centers form graph vertices connected by collision-checked edges. Incremental local subgraph changes are exchanged and merged peer-to-peer.
B. Hierarchical Planning:
- Global exploration targets are frontier clusters selected using visibility gain, mapped to reachable nodes on the topological graph.
- Global task allocation is formulated as a multi-depot vehicle routing problem (MDVRP) balancing workload and minimizing travel cost, solved centrally or distributedly.
- Cross-UGV loop closure candidates are scored by a pose-uncertainty-aware utility function that considers predicted pose covariances and spatial proximity to select top loop anchors.
- Local path planning solves a symmetric traveling salesman problem (TSP) on an augmented waypoint set including loop anchors, frontiers, and subgraph boundary intersections for loop-aware route refinement.
Training Regime: The descriptor backbone is retrained with diverse multi-UGV data including strong yaw and lateral offsets to improve robustness; details on epochs, batch size, optimizer, or seeds are not fully specified. The spectral-guided prealignment is a lightweight preprocessing step without added model complexity.
Evaluation Protocol:
- Loop closure detection is evaluated by average recall (AR@1 and AR@1%) on benchmark sequences.
- Localization evaluated by Absolute Trajectory Error (ATE) per UGV over multiple scenarios.
- Exploration performance measured by total time, travel distance, loop closures, path overlap, and path balance metrics.
- Communication bandwidth usage measured by aggregate data transmitted per UGV.
- Ablations include comparisons across different descriptors integrated into the same pipeline and different planning algorithms (mTSP baseline, MDVRP, with/without loop-aware refinements).
- Network robustness tested by injecting communication delays and bandwidth caps.
- Reproducibility: No explicit code release is mentioned. Datasets used are public (KITTI, Mulran, S3E) or collected by authors. Detailed algorithmic procedures and evaluation metrics are disclosed to allow partial reproducibility. Specific training parameters for the descriptor model are not fully detailed.
Concrete Example (End-to-End): A UGV collects a 3D LiDAR scan transformed into a spherical range image. Spectral and gradient saliency scores select the canonical azimuth alignment, producing a rotation-invariant input. This image passes through a four-stage Swin Transformer generating a 256-D global descriptor. The descriptor is compared against peer UGV KD-trees to detect candidate loops. Upon a match, Fast-GICP verifies spatial alignment at the point cloud level. Verified loop closures trigger asynchronous iSAM2 pose graph optimization maintaining consistent global trajectories. The system voxelizes the local environment, constructing a sparse topological graph. Frontier clusters are identified for exploration targets, and tasks are allocated globally via MDVRP solver. Predicted pose covariances inform scoring and selection of loop closure waypoints, which are added into a local TSP planner to refine the route before execution. Throughout, only compact descriptors and incremental topological subgraph updates are shared, drastically reducing communication overhead.
Technical innovations
- A novel spectral-guided azimuthal prealignment method substantially improves viewpoint invariance of LiDAR global descriptors under large yaw and lateral shifts without increasing descriptor complexity.
- Integration of an uncertainty-aware loop-closure selection mechanism that scores candidate cross-UGV loop closures based on predicted pose covariance and spatial proximity, dynamically selecting high-utility loop closures as planning anchors.
- A fully distributed SLAM framework exchanging only compact descriptors and incremental sparse topological subgraphs rather than dense point clouds, enabling communication-efficient inter-UGV coordination under bandwidth constraints.
- Coupling of distributed localization with a loop-aware hierarchical planning approach that integrates loop closure anchors into both global multi-depot routing and local traveling salesman problem solving to improve exploration efficiency.
Datasets
- KITTI sequences 00,02,05,08 — multiple kilometers urban driving scenes — public
- Mulran Riverside 02 — outdoor driving sequences with wide-lane shifts — public
- S3E benchmark scenarios (Library, Playground) — simulated environment scenarios — public
- Author-collected large-scale Scene 1 (industrial park) and Scene 2 (suburban area) — real-world data — not publicly released
Baselines vs proposed
- Scan Context++: Mean AR@1=72.4%, AR@1%=82.4% vs Proposed: 89.9% / 95.5% (Table I)
- OverlapTransformer: Mean AR@1=80.7%, AR@1%=92.7% vs Proposed: 89.9% / 95.5% (Table I)
- LiDAR-Iris (DCL-SLAM): Mean AR@1=84.6%, AR@1%=91.0% vs Proposed: 89.9% / 95.5% (Table I)
- Fast-LIO2 ATE (Library scenario) = 1.468m vs Proposed: 0.449m (UGV1) (Table II)
- DCL-SLAM ATE (Scene 1) = 7.542m vs Proposed: 0.887m (UGV1) (Table II)
- mTSP baseline exploration time = 305.29s vs Proposed MDVRP+LOOP: 258.10s (-15.4%) (Table VI)
- mTSP baseline travel distance = 1683.95m vs Proposed MDVRP+LOOP: 1443.81m (-14.3%) (Table VI)
- Communication bandwidth (3 UGVs) = 82.89 MB total for proposed framework vs higher volumes for baseline methods using dense point clouds (Table V)
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2606.11088.
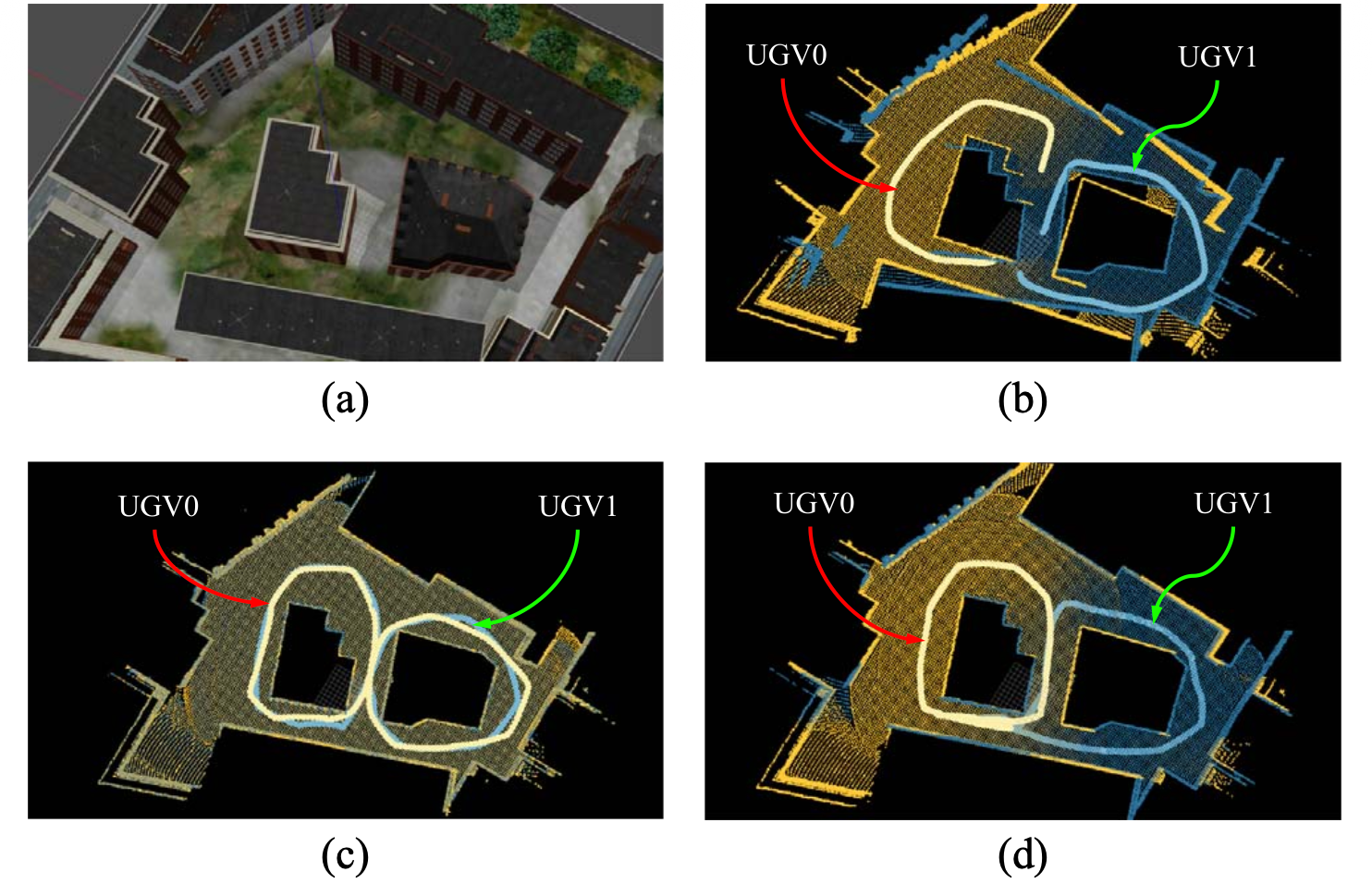
Fig 1: Overview and motivation. Colored trajectories and point clouds show
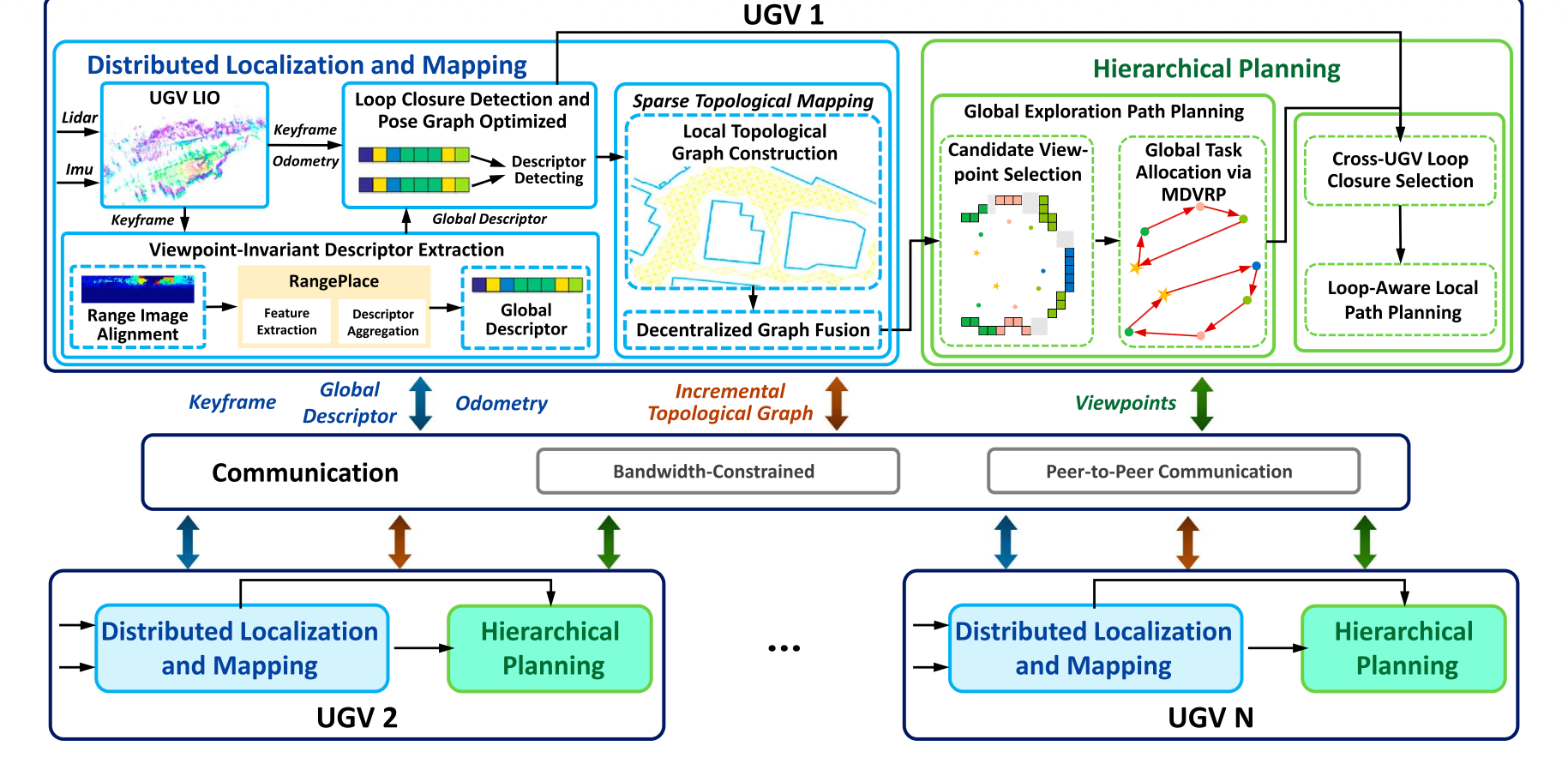
Fig 2: Overview of the proposed collaborative exploration framework for multi-UGV systems in resource-limited environments. The architecture integrates
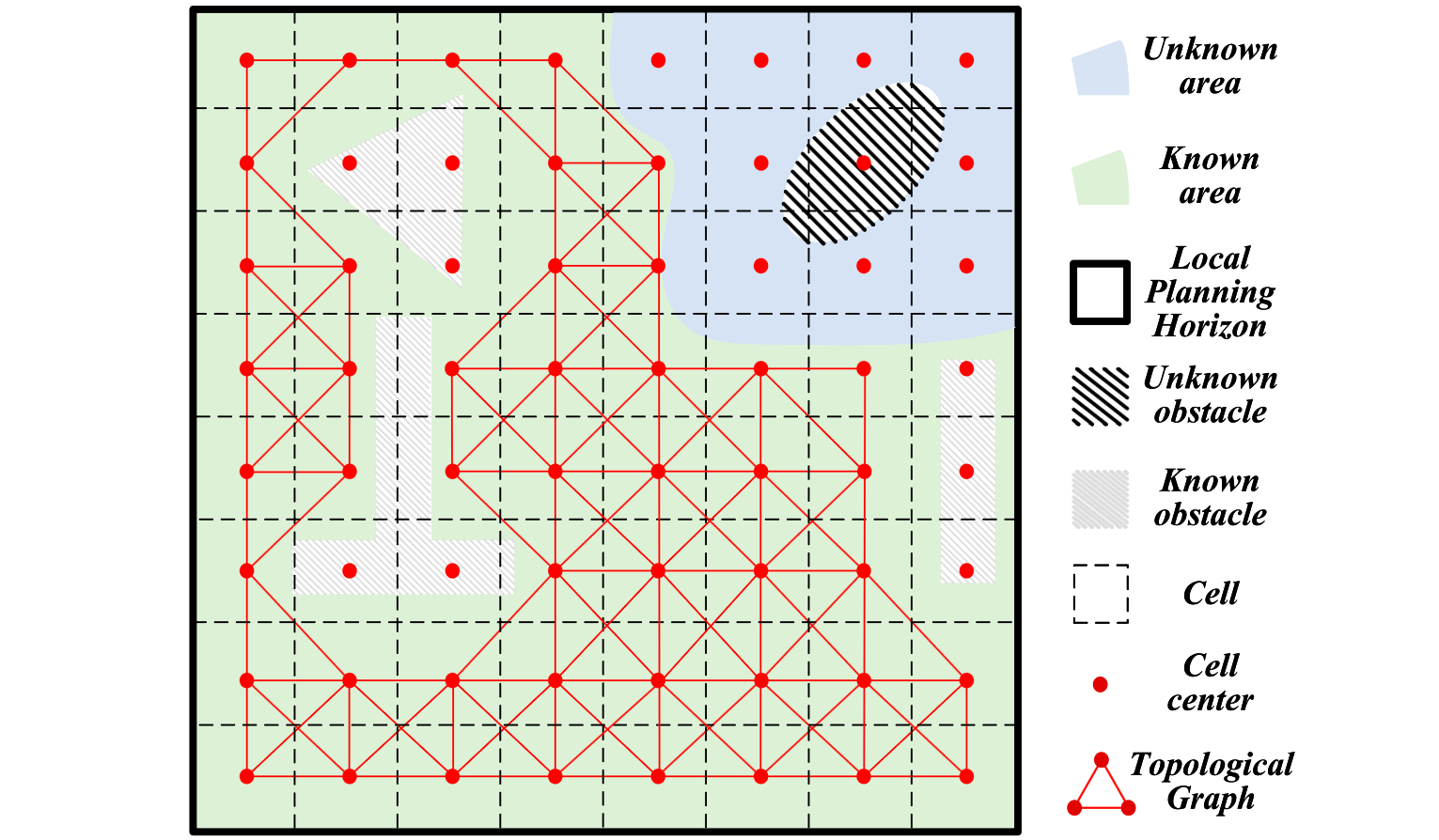
Fig 3: Illustration of grid-based local topological graph construction.
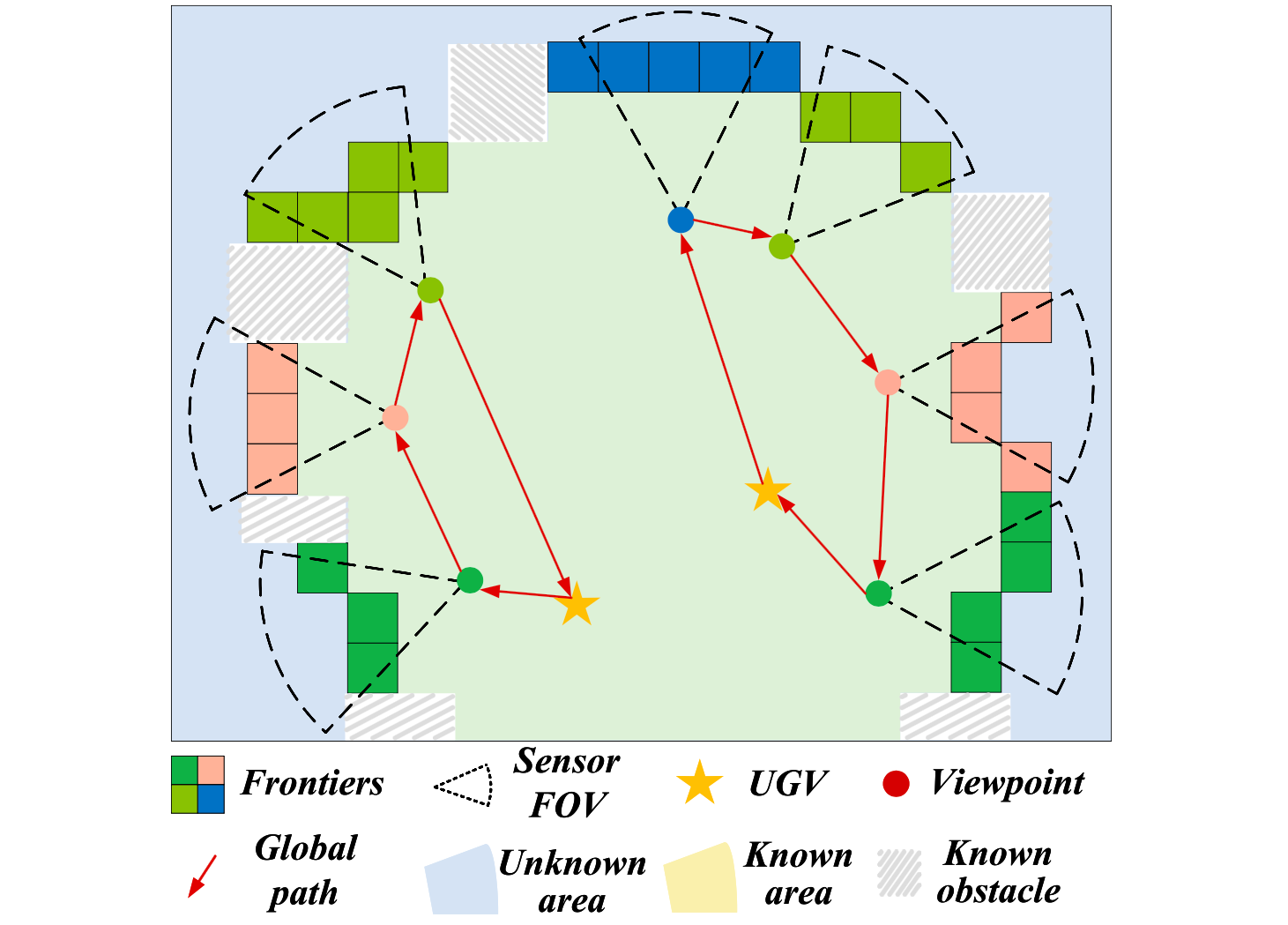
Fig 4: Frontier-based multi-UGV exploration illustrating clustering, view-
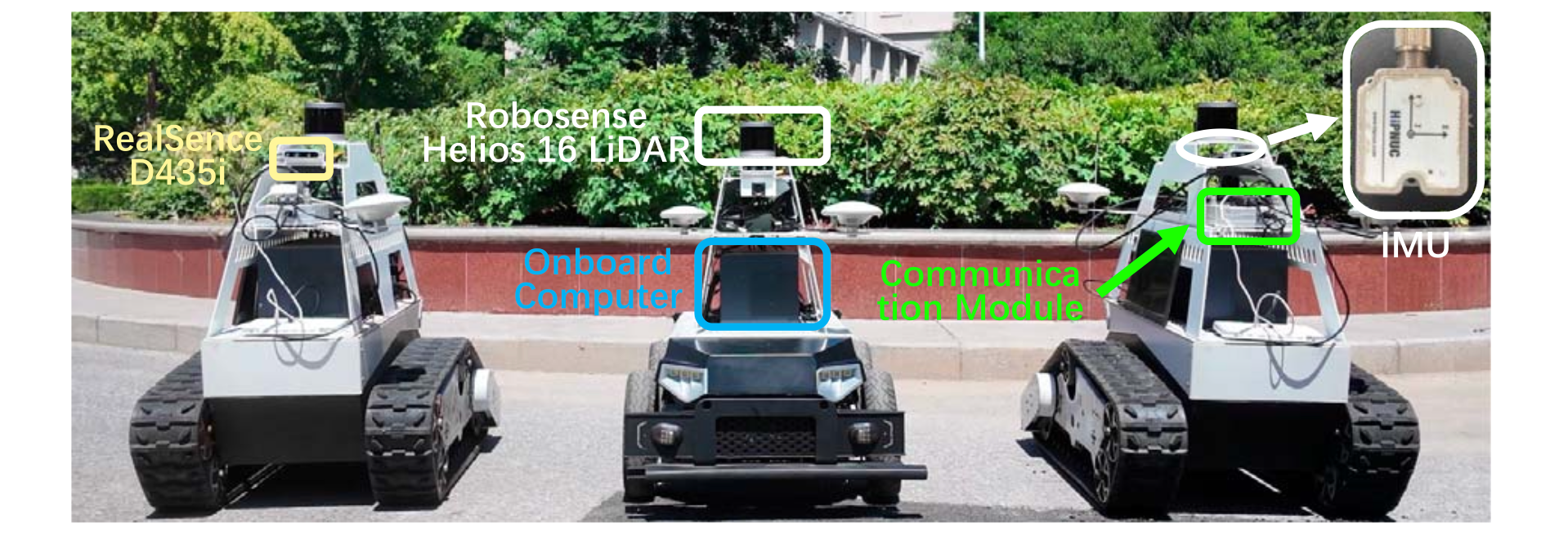
Fig 5: UGV platforms used in the experiments. Each UGV is equipped with
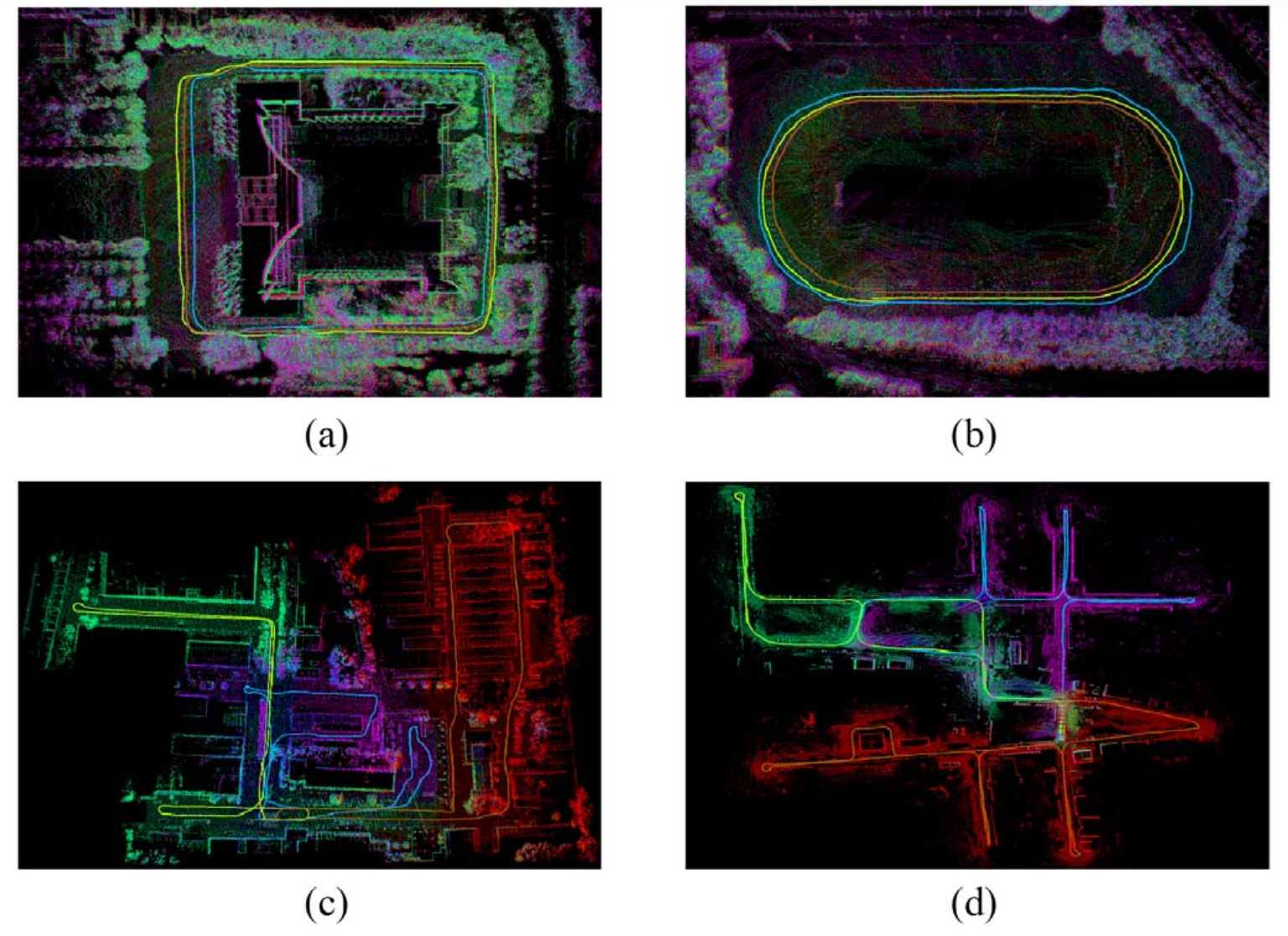
Fig 6: Visualization of mapping results across four representative environ-
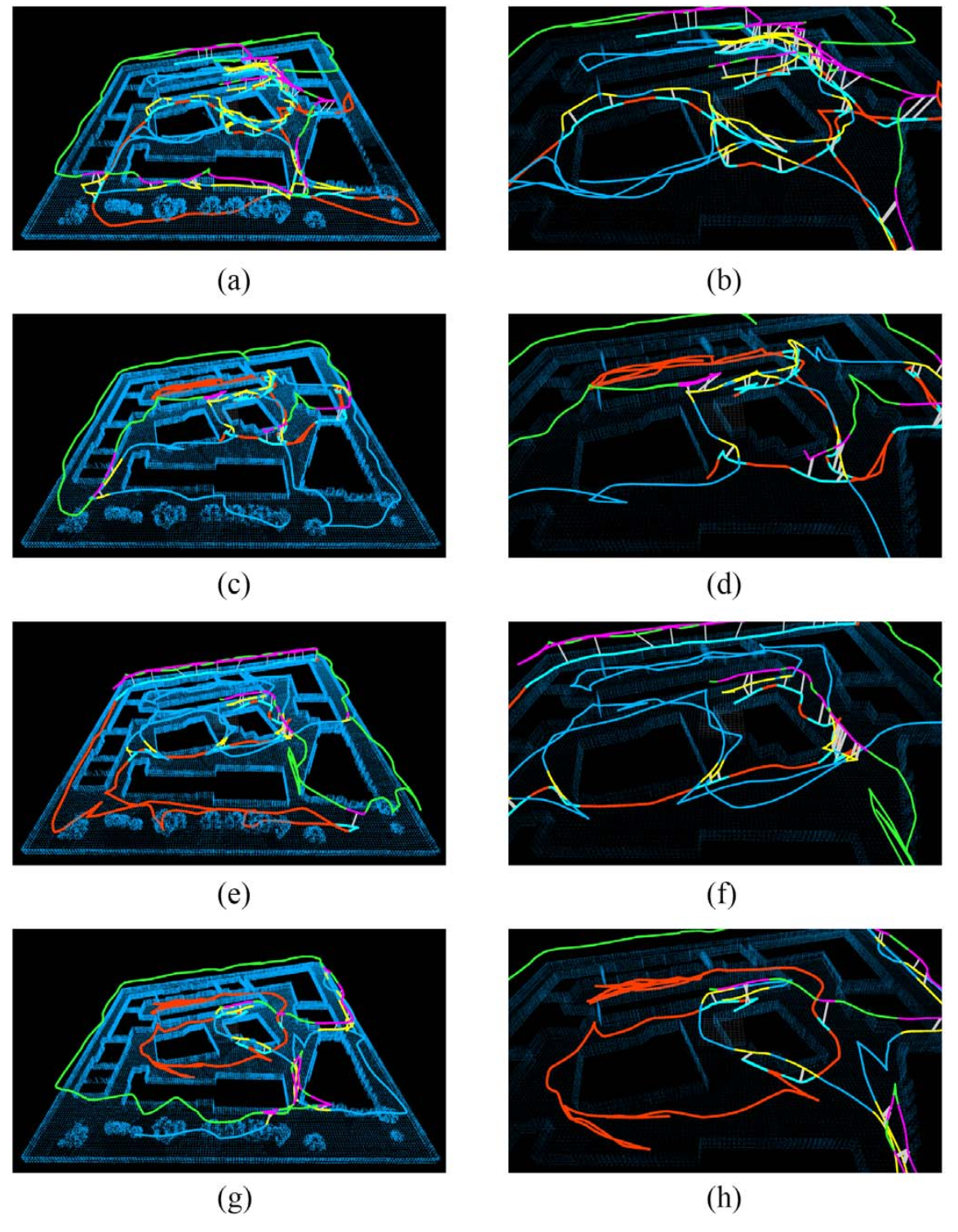
Fig 7: Qualitative comparison of multi-UGV exploration trajectories under
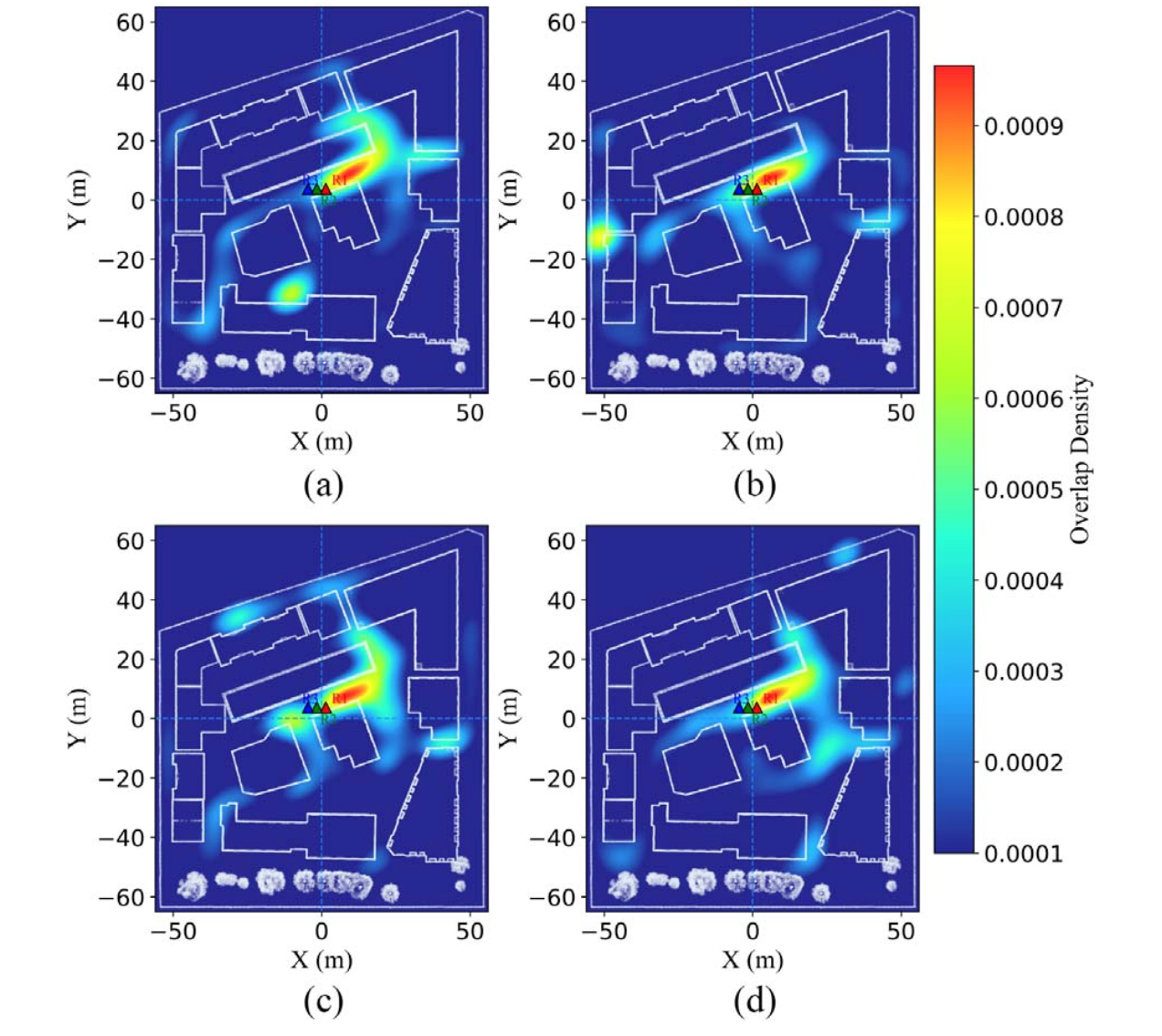
Fig 8: Heatmap comparison of path overlap under different planning
Limitations
- No explicit adversarial or malicious attack evaluation; robustness against active spoofing or targeted denial of service is untested.
- Descriptor training details such as epoch counts, datasets used for training, and hyperparameter settings are not fully disclosed, limiting reproducibility of the descriptor.
- Real-world large-scale datasets collected by authors are not publicly available, preventing direct external benchmarking or independent validation.
- The system focuses on 3D rotating multi-beam LiDARs with >16 beams and excludes planar or low-beam-count sensors, limiting applicability for resource-constrained platforms with simpler sensors.
- Communication impairments above 3 seconds latency or bandwidth lower than 0.6 Mbps cause notable performance degradation, indicating constrained operational envelopes.
- The global MDVRP task allocator is solved with a weighted objective and constraints but without discussion on solver scalability or real-time guarantees in very large multi-UGV fleets.
Open questions / follow-ons
- How would the descriptor and loop-closure framework perform under intentional adversarial spoofing or sensor attacks?
- Can the decentralized MDVRP and TSP planners scale efficiently to dozens or hundreds of UGVs operating collaboratively in larger environments?
- What are the theoretical limits or trade-offs between communication overhead, localization accuracy, and exploration efficiency under stricter network constraints?
- Could the descriptor prealignment and loop selection modules be combined with learned uncertainty models to further improve robustness?
Why it matters for bot defense
While this work focuses primarily on distributed multi-robot SLAM and exploration, its methodology for loop closure detection under viewpoint and resource constraints shares conceptual parallels with bot-defense systems distinguishing legitimate cross-entity signals versus perturbations. The descriptor prealignment and uncertainty-driven selection mechanisms resemble challenges in detecting robust patterns in noisy or adversarial environments. Bot-defense engineering might draw inspiration from the scalable, low-bandwidth communication and decentralized consensus strategies used here to design distributed verification or anti-automation schemes that rely on minimal but robust feature exchanges. The explicit integration of loop closure confidence into planning can analogously inform CAPTCHAs or behavioral analyses that adapt dynamically based on confidence in user identity signals. However, direct application requires further abstraction as the domains differ fundamentally in sensor modalities and threat characteristics.
Cite
@article{arxiv2606_11088,
title={ A Distributed Multi-UGV Exploration Framework With Loop-Aware Planning and Descriptor-Aided Localization in Resource-Limited Environments },
author={ Zhiwei Li and Haiou Liu and Xijun Zhao and Ji Li and Yingze Wang and Boyang Wang },
journal={arXiv preprint arXiv:2606.11088},
year={ 2026 },
url={https://arxiv.org/abs/2606.11088}
}