
BERS: Locally Optimal Continuous Algorithm for Maritime Weather Routing with Just-in-Time Arrival
Source: arXiv:2605.31533 · Published 2026-05-29 · By Daniel Precioso, Francisco Suárez, Javier Jiménez de la Jara, Rafael Ballester-Ripoll, David Gómez-Ullate
TL;DR
This paper addresses the challenging problem of maritime weather routing, which requires optimally planning vessel trajectories under dynamically changing wind, wave, and current conditions, while respecting constraints such as obstacle avoidance and strict arrival time targets. The authors propose BERS (Bézier Evolve and Refine Strategy), a hybrid two-stage continuous optimization framework that represents routes as Bézier curves. BERS first applies the global evolutionary optimizer CMA-ES to explore route space and produce candidate trajectories, then applies a local variational refinement method (FMS) to ensure convergence to locally optimal routes with smooth, feasible paths. This approach effectively balances flexibility, obstacle avoidance, smoothness, and rigorous cost evaluation with dense mid-segment sampling. Synthetic benchmark experiments across multiple classical vector flow fields demonstrate that BERS achieves or improves on best-known solutions while simultaneously meeting seven operational criteria: route continuity, obstacle avoidance, dynamic adaptation to flow, flexible cost functions, constant engine load operation, just-in-time arrival, and local optimality. Real-world validation on two major trans-oceanic corridors with physics-based vessel models and hourly ERA5 weather data for 366 daily departures in 2024 shows propulsive energy savings of 23-59% versus great-circle baseline routes. With wind-assisted propulsion enabled, total energy savings can reach up to 75%. These findings indicate that BERS offers a practical and scalable solution to energy-efficient and just-in-time maritime weather routing, supporting both operational deployment and efforts toward maritime decarbonization.
Key findings
- BERS satisfies all seven key criteria for practical weather routing (continuity, obstacle avoidance, dynamic adaptation, flexible objective design, constant engine load, just-in-time arrival, local optimality), a first in the literature (Table 1).
- In synthetic benchmarks (Circular, Four Vortices, Double Gyre, Techy, Swirlys vector fields), BERS matches or improves best-known travel times or fuel costs, e.g., Four Vortices optimal time found by BERS = 8.95 (matches prior work) (Table 2).
- Local FMS refinement after CMA-ES evolutionary search improves route cost significantly, for example reducing fuel cost in the Swirlys vector field from 5.73 (literature) to 1.97 (BERS) and increasing fuel savings from 66% to 74% in a Trans-Atlantic scenario (Fig 1).
- Dense continuous sampling of Bézier curves enables detection and avoidance of mid-segment obstacle collisions and environmental penalties, supporting robust obstacle avoidance even in complex Perlin-noise generated terrains.
- Real-world experiments with hourly ERA5 ocean forcing over 366 daily trans-oceanic voyages in 2024 demonstrate that route optimization alone reduces mean propulsive energy consumption by 23–59% compared to great-circle baseline routes.
- Incorporation of wind-assisted propulsion (rigid wingsails) combined with route optimization can yield total energy savings up to 75%, showing strong synergy between routing and novel vessel technologies.
- The hybrid approach leveraging the global search capabilities of CMA-ES and the guaranteed local convergence properties of variational FMS refinement provides robust convergence under challenging flow fields and land geometries.
Threat model
n/a - This paper focuses on maritime route optimization algorithms without explicit adversarial threat modeling. The goal is to optimize vessel energy use and scheduling under dynamic environmental conditions, not to defend against malicious actors.
Methodology — deep read
The BERS framework operates in a two-stage process leveraging Bézier curve parametrizations for continuous trajectories.
Threat Model & Assumptions: The adversary is not directly modeled as this is an optimization method for maritime routing under environmental uncertainty. The algorithm assumes knowledge of dynamic vector fields representing wind, waves, and currents (ERA5 data for real experiments), obstacle maps, and vessel dynamics models. It aims to find energy- or time-optimal routes respecting constraints.
Data: Synthetic benchmarks include five classical 2D vector fields: Circular (ω=-0.9), Four Vortices, Double Gyre, Techy, and Swirlys, serving as stress tests for continuity, obstacles, dynamics, and cost function flexibility. Real data experiments use hourly ERA5 ocean weather forcing data over 366 daily departures in 2024 along Atlantic and Pacific trans-oceanic corridors, applied to an 88m cargo vessel model optionally equipped with rigid wingsails.
Architecture / Algorithm: Routes are parametrized as degree-K 2D Bézier curves defined by control points (endpoints fixed at source/destination, intermediate control points free). The CMA-ES evolutionary optimizer performs global search over control points using a multivariate Gaussian update to minimize an objective related to travel time, fuel, or energy consumption. Infeasible trajectories crossing land obstacles are penalized heavily via a land penalty computed by dense sampling of intermediate points on the curve and querying a bilinear-interpolated land mask defined by Perlin noise or realistic coastline maps. After CMA-ES converges, the best candidate curve is discretized into a polyline of L ≫ K waypoints. The FMS (Ferraro-Martín de Diego-Sato) variational method locally refines interior waypoints via solving discrete Euler-Lagrange optimization conditions using numerically approximated gradients and Hessians. It ensures local optimality and maintains hard land-avoidance constraints by rejecting unsafe moves.
Training Regime: CMA-ES is run with configurable population size, initial standard deviation σ0 controlling exploration, and a termination tolerance based on cost reduction. FMS iterates vertex updates scaled by a relaxation parameter ρ=0.5 until cost reduction falls below 10^{-12} in two consecutive sweeps.
Evaluation: Evaluation metrics include travel time or fuel consumption under constant engine load or fixed-time fuel objectives. BERS is evaluated against published baselines on synthetic benchmarks and on real ocean data against great-circle baselines for identical propulsion modes. Ablations compare CMA-ES alone vs. CMA-ES + FMS refinement (Fig 1). Dense continuous sampling supports obstacle avoidance testing across increasingly complex terrains (Perlin noise). Statistical significance testing details are not explicitly stated.
Reproducibility: The authors provide Python implementations using JAX for vectorized computation and pycma for CMA-ES, with code available on GitHub. The ERA5 weather data and vessel model are publicly available or described in referenced works, but the paper does not explicitly mention releasing trained model weights as this is an optimization algorithm rather than a learned model.
A Concrete Example: To optimize a route from port A to B in a rotating Circular flow field with constant vessel speed, BERS first initializes a Bézier curve with control points. CMA-ES samples and evaluates a batch of trajectories via dense path sampling under the cost function (travel time plus large penalties for land crossings). After several iterations converging on a low-cost path, the best Bézier curve is discretized into many waypoints and refined locally by FMS, adjusting interior waypoints to further reduce cost while ensuring no trajectory crosses land. The resulting route balances smoothness, obstacle avoidance, travel time, and feasibility constraints, yielding a solution matching the known optimum travel time of 1.98 in this setting.
Technical innovations
- Introduction of a hybrid continuous maritime routing algorithm combining global CMA-ES evolutionary search over Bézier curve control points with local variational refinement (FMS) for guaranteed local optimality.
- Parametrization of routes using low-dimensional 2D Bézier curves with dense along-path sampling, enabling smooth trajectories and explicit mid-segment obstacle and environmental effect evaluation.
- A novel land avoidance penalty implementation based on dense sampling and bilinear interpolation of a continuous land-water scalar field, allowing strict obstacle handling without differentiability requirements.
- Modular objective function design supporting flexible cost functions including travel time, fuel consumption under constant engine load, and just-in-time arrival constraints.
- Implementation of hard land avoidance constraints during the local FMS refinement by unconditional rejection of infeasible waypoint moves, ensuring feasibility preservation.
Datasets
- Circular vector field — synthetic, size not applicable — public benchmark formulation
- Four Vortices vector field — synthetic, size not applicable — public benchmark formulation
- Double Gyre vector field — synthetic, size not applicable — public benchmark formulation
- Techy vector field — synthetic, size not applicable — public benchmark formulation
- Swirlys vector field — synthetic, size not applicable — public benchmark formulation
- ERA5 hourly ocean weather forcing data — 366 daily departures in 2024 — public atmospheric reanalysis dataset
Baselines vs proposed
- Circular benchmark: Best-known time = 1.98 vs BERS time = 1.98
- Four Vortices benchmark: Best-known time = 8.95 vs BERS time = 8.95
- Double Gyre benchmark: Best-known time = 1.01 vs BERS time = 1.01
- Techy benchmark: Best-known time = 1.03 vs BERS time = 1.03
- Swirlys benchmark: Best-known fuel cost = 5.73 vs BERS fuel cost = 1.97
- Trans-Atlantic real-ocean route: CMA-ES baseline fuel savings = 66%, BERS (CMA-ES + FMS) fuel savings = 74%
- Real-ocean route energy savings: route optimization alone reduces mean propulsive energy by 23–59% vs great-circle baseline; combined with wind-assisted propulsion up to 75%
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.31533.
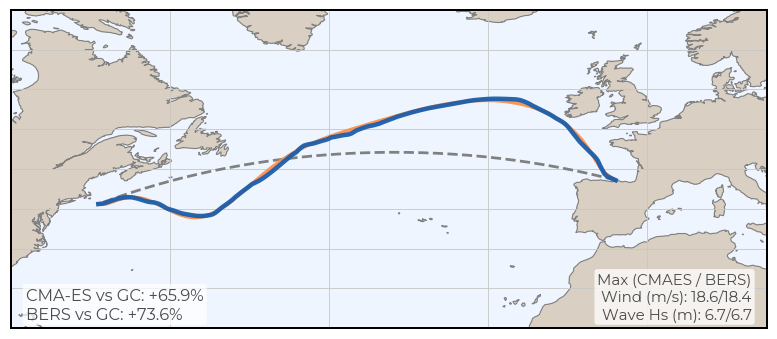
Fig 1: Representative Trans-Atlantic spring route comparing great-circle (GC), CMA-ES, and the final BERS route (CMA-ES + FMS). The
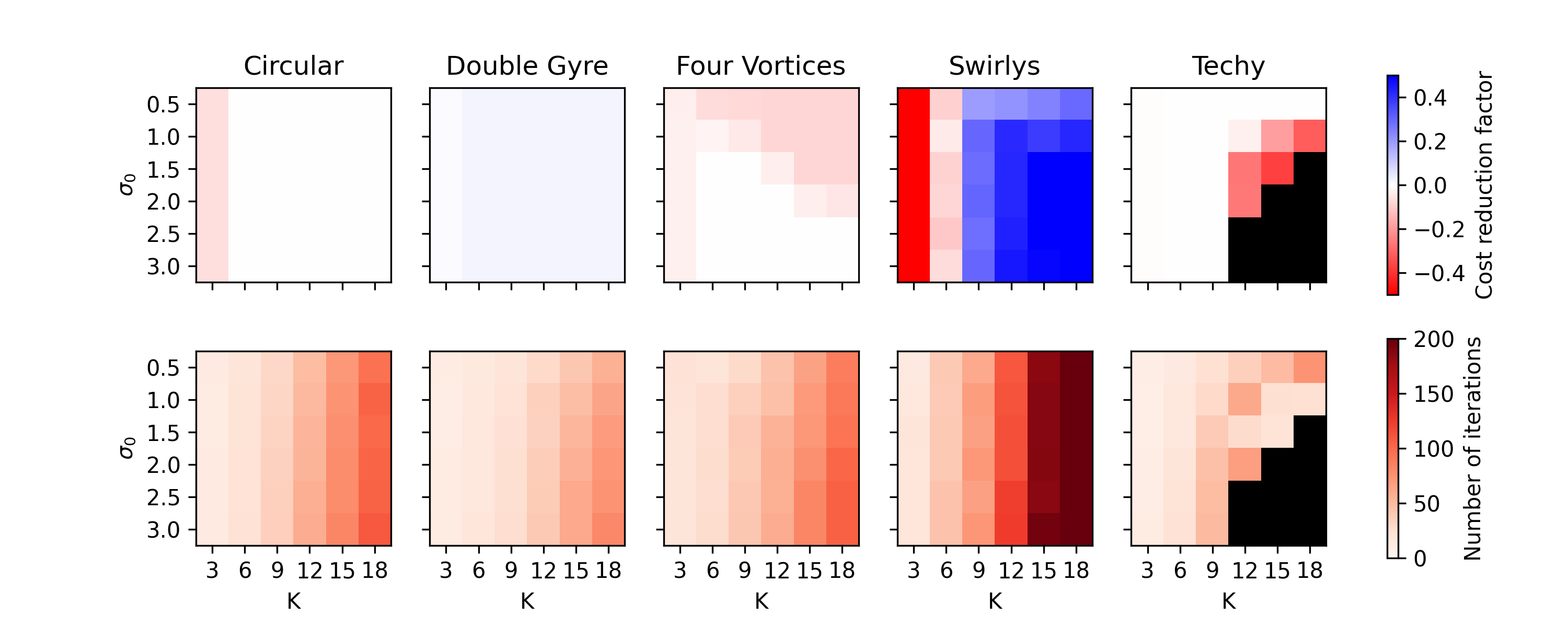
Fig 2: Cost reduction achieved by CMA-ES compared to the litera-
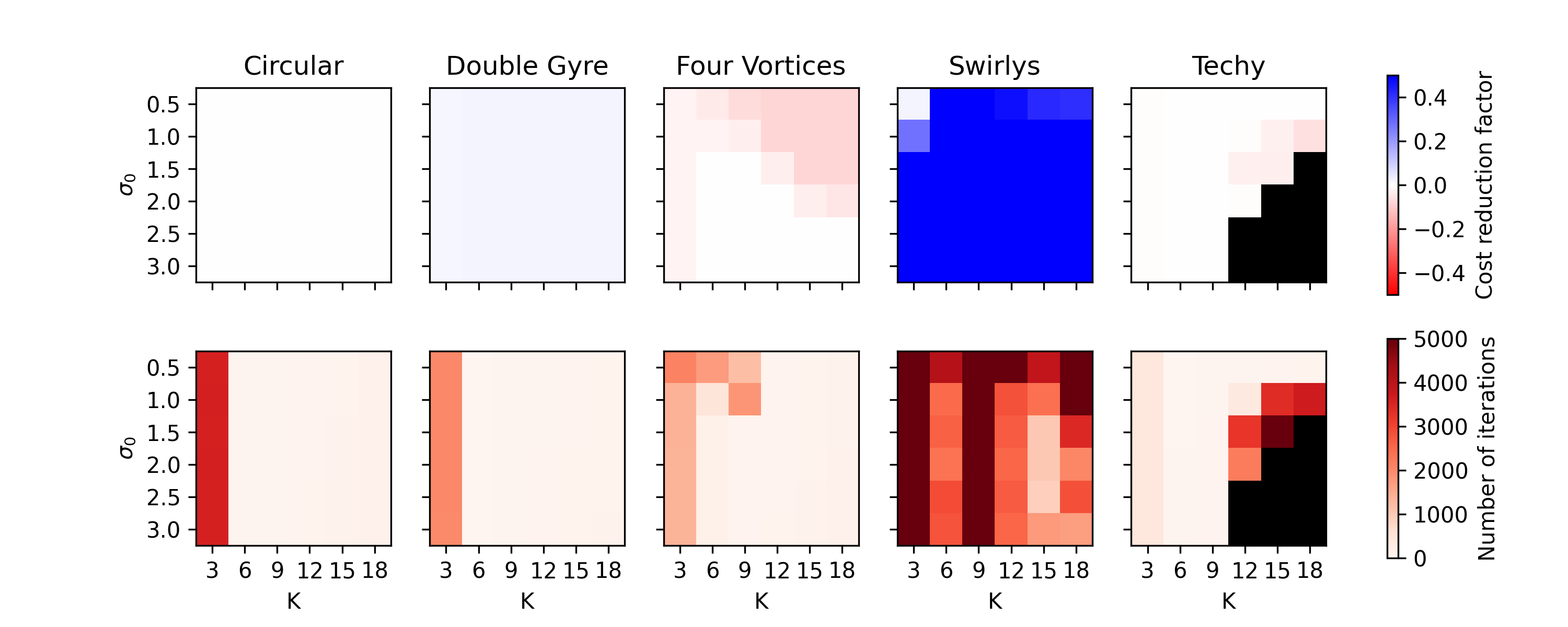
Fig 3: illustrates that FMS yields the greatest benefit
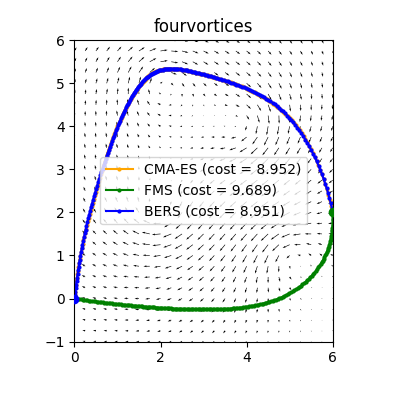
Fig 4: Routes obtained by the CMA-ES algorithm alone (orange),
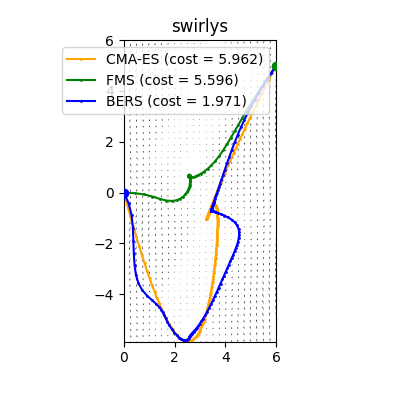
Fig 5: Route obtained by BERS in the Swirlys vector field under a
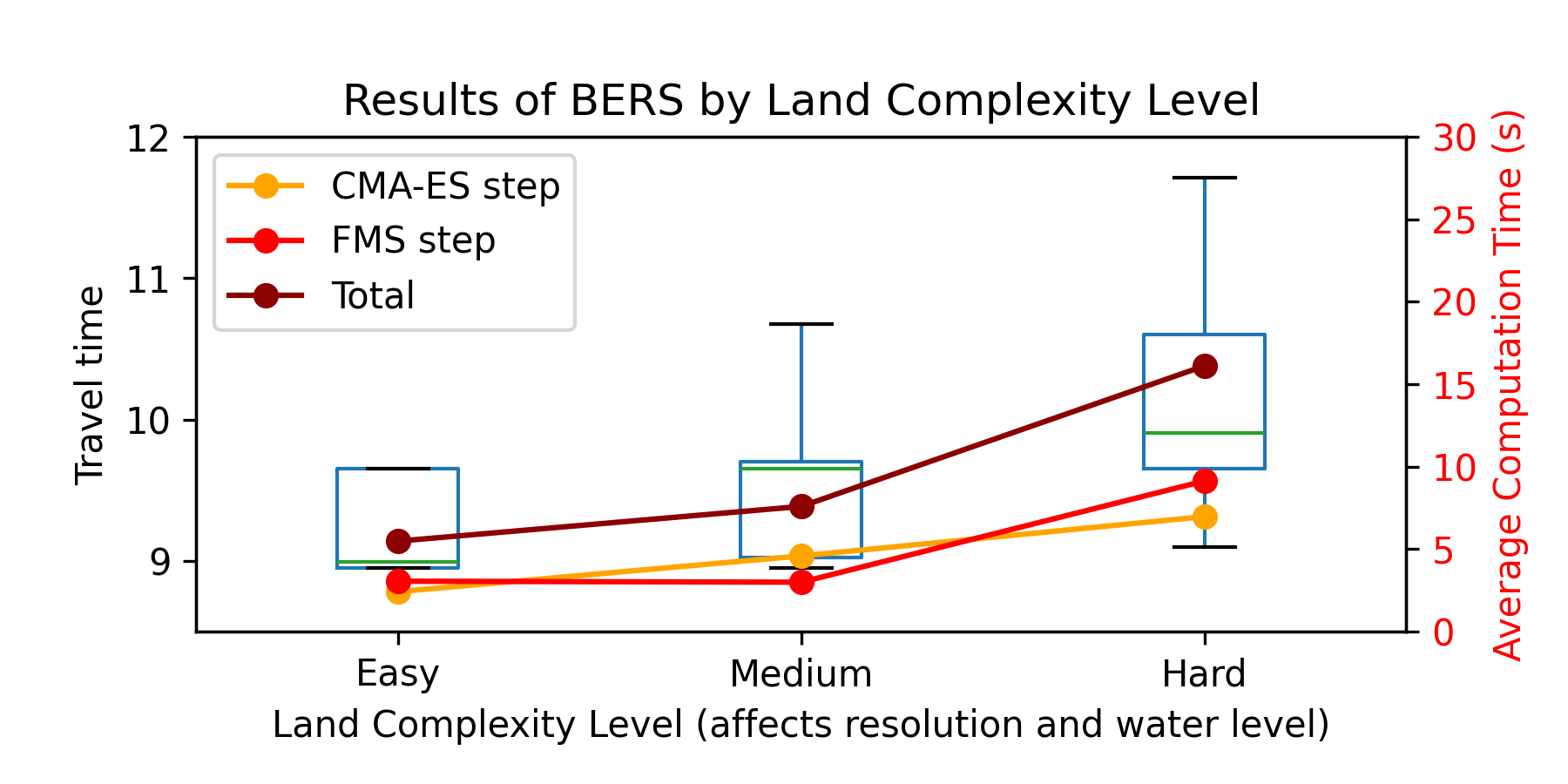
Fig 6: Performance of BERS across increasing land complexity.
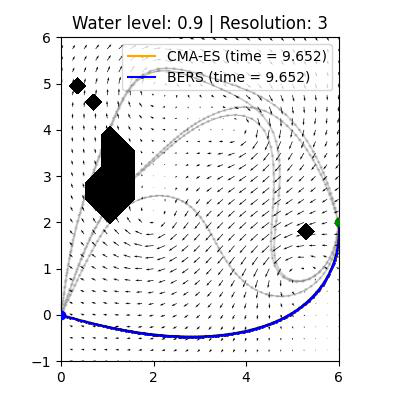
Fig 7: Representative result in an easy scenario. CMA-ES alone
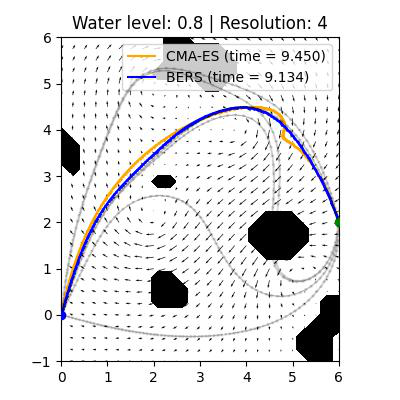
Fig 8: Representative result in a medium scenario. FMS slightly
Limitations
- Evaluation on synthetic vector fields is limited to 2D planar scenarios, simplifications of real ocean complexity.
- Real-ocean validation focuses on 2024 ERA5 weather forcing and specific vessel models; performance may vary with other ocean data or vessel types.
- No explicit adversarial or robustness evaluation under adversarial conditions such as sensor errors or malicious route disruptions.
- The FMS method requires numerical approximation of gradients and Hessians which may increase computation and risk numerical instability in certain scenarios.
- Global optimality cannot be guaranteed due to stochastic nature of CMA-ES; local minima could still limit best solution in complex terrains.
- No detailed statistical analysis or uncertainty quantification on route cost outcomes is reported.
Open questions / follow-ons
- How would BERS perform on fully 3D routing scenarios including vertical oceanographic effects or air drafts relevant for under-bridge clearance?
- Can the framework incorporate probabilistic or uncertain weather forecasts to deliver robust or risk-aware routing?
- What are the computational trade-offs and scalability limits of BERS for real-time global fleet routing with many vessels and dynamic weather updates?
- How can the hybrid approach be expanded to integrate other vessel technologies beyond rigid wingsails or adaptive hull configurations?
Why it matters for bot defense
While the primary domain of the BERS algorithm is maritime route optimization rather than bot defense, the paper's technical insights into continuous trajectory parametrization, dense evaluation of constraints along paths, and hybrid global-local optimization strategies provide relevant methodological parallels for CAPTCHA and bot-defense practitioners. Specifically, modeling complex continuous decision spaces with smooth differentiable parametrizations and combining global stochastic search with local refinement steps could inspire new ways to generate or validate CAPTCHA challenges that balance usability and robustness.
Furthermore, BERS’s approach to enforcing hard constraints (obstacle avoidance) combined with soft environmental penalties informs the design of multi-objective security mechanisms that must navigate trade-offs between strict denial conditions and graceful degradation. The dense mid-segment sampling concept parallels high-resolution challenge evaluation in CAPTCHA to prevent adversarial bypass on subtle cues. Overall, BERS showcases a practical hybrid framework that might inform future CAPTCHA challenge generation and verification methods requiring continuous parameter tuning under complex constraints.
Cite
@article{arxiv2605_31533,
title={ BERS: Locally Optimal Continuous Algorithm for Maritime Weather Routing with Just-in-Time Arrival },
author={ Daniel Precioso and Francisco Suárez and Javier Jiménez de la Jara and Rafael Ballester-Ripoll and David Gómez-Ullate },
journal={arXiv preprint arXiv:2605.31533},
year={ 2026 },
url={https://arxiv.org/abs/2605.31533}
}