
Secure UAV Swarms in Low-Altitude Wireless Networks: Challenges and Solutions
Source: arXiv:2605.26876 · Published 2026-05-26 · By Yuntao Wang, Haojia Yang, Han Liu, Jianle Ba, Zhou Su
TL;DR
This paper addresses the critical security challenges faced by unmanned aerial vehicle (UAV) swarms operating in low-altitude wireless networks, where open wireless environments, high dynamics, and resource constraints expose them to complex threats such as GPS spoofing, insider UAV attacks, and multi-hop network intrusions. The authors propose a novel cloud-edge-end collaborative defense framework that leverages hierarchical coordination among cloud, edge nodes, and UAVs themselves to realize scalable, resilient protection. Within this framework, three complementary mechanisms are developed: a cooperative perception scheme based on game-theoretic modeling to resist GPS spoofing attacks by collaboratively reconstructing position and optimizing defense intensity; a trust-aware dynamic behavioral authentication method that utilizes continuous Bayesian updates and swarm-level trust fusion to detect stealthy insider UAVs; and a multi-agent attack forensics system that employs formal logic-based reasoning and a multi-agent LLM-driven collaborative architecture to intelligently trace multi-hop penetration attack paths. Experimental simulations with a 500-UAV swarm demonstrate the effectiveness of these approaches in reducing defense costs against GPS spoofing and minimizing overhead during multi-hop attack trace and mitigation compared to six baseline defense strategies. This work highlights the need for incentive-compatible, adaptive cooperation and advanced reasoning for practical UAV swarm security in adversarial environments.
Key findings
- The proposed cooperative GPS spoofing defense achieves the lowest defense cost during 2-5 seconds of attack compared to Continuous Operation Strategy (COS), Linear Feedback Strategy (LFS), and Greedy Strategy (GS) (Fig. 5).
- Under multi-hop penetration attacks between 10-30 seconds, the multi-agent proactive protection approach maintains the lowest average defense overhead, outperforming Formal Logic Strategy (exponential overhead growth), Single-Agent Strategy (oscillatory overhead), and Greedy Patching Strategy (overhead spikes) (Fig. 6).
- 20% insider UAVs impact swarm security, mitigated effectively by the trust-aware behavioral authentication combining single-node Bayesian updates with distributed collaborative trust fusion.
- Collaborative position reconstruction uses semi-definite programming (SDP) based on multi-dimensional geometric residuals to estimate true UAV positions in the presence of GPS spoofing.
- A Bayesian game models outer-layer strategic interaction between attacker and UAV swarm, while an inner-layer mean field game governs individual UAV defense intensity decisions, solved via Hamilton-Jacobi-Bellman and Fokker-Planck-Kolmogorov equations.
- LLM-based multi-agent attack tracing breaks path reasoning into distinct roles (path reasoning, deduplication, sub-path exploration, result verification) to reduce hallucinations and improve attack path coverage.
- Formal logic reasoning condenses vulnerability data into Horn clause-based atomic facts for scalable attack path analysis and adaptive vulnerability patching prioritized by exploitation frequency and topological importance.
- Dynamic behavioral authentication uses probe tasks with observable metrics (task delay and execution accuracy) and Bayesian updating to detect insiders showing strategic camouflage.
Threat model
The adversary is an intelligent attacker capable of launching GPS spoofing attacks by forging satellite signals to manipulate UAV navigation, compromising a subset of UAVs to perform insider malicious behaviors, and conducting stealthy multi-hop penetration attacks exploiting network vulnerabilities to propagate influence within the swarm. The attacker aims to disrupt swarm coordination, induce mission failure, or leak sensitive data. Attackers are constrained by limited detection probabilities and the dynamic, distributed defense mechanisms available. They cannot override global cloud-level defenses or instantly compromise the entire swarm but can adapt strategies dynamically within network topology changes.
Methodology — deep read
The authors start with a cloud-edge-end collaborative architecture for UAV swarm security, where the cloud handles global threat intelligence and policy orchestration, edge nodes perform localized anomaly detection and intermediate processing, and UAVs execute autonomous sensing and light security modules enabling real-time defense. The threat model assumes intelligent adversaries launching GPS spoofing, insider attacks by compromised UAVs, and stealthy multi-hop penetration exploiting network vulnerabilities. The attacker can forge GPS signals, compromise nodes internally, and propagate malicious influence via network links. Key assumptions include UAV resource constraints limiting defense capabilities on individual nodes and dynamic topologies causing frequent changes in connectivity.
Data provenance derives from simulation of a swarm of 500 UAVs distributed following a 3D Poisson point process with communication and sensing radii modeled realistically; 20% of UAVs are designated insiders in the experiments. Attack scenarios include GPS spoofing via forged satellite signals causing continuous trajectory drift, and multi-hop penetration attacks targeting mission critical assets exploiting distributed vulnerabilities. Task probing data for behavioral authentication is synthesized from UAV performance metrics like task delay and positional accuracy.
The cooperative GPS spoofing defense involves two major components: (1) Collaborative position reconstruction, where UAVs measure inter-UAV distances on line-of-sight links and compute geometric residuals between measured distances and GPS-reported locations. High-confidence neighbors serve as anchors in a semi-definite programming (SDP) optimization to estimate the true location of suspected spoofed UAVs. The corrected position is fused with original GPS data weighted by confidence scores. (2) A double-layer decision mechanism combining a Bayesian game at the swarm level, modeling attacker vs swarm strategy regarding spoofing intensity and defense intensity, and a mean field game (MFG) for individual UAVs deciding their collaborative defense intensity to minimize a cost function incorporating latency, energy, and position deviation risk. The Hamilton-Jacobi-Bellman (HJB) and Fokker-Planck-Kolmogorov (FPK) equations govern the inner UAV decision dynamics. A fictitious play method approximates the Bayesian equilibrium. This nested optimization runs in a model predictive control (MPC) rolling horizon fashion.
The trust-aware behavioral authentication framework comprises (1) a dynamic Bayesian updating model, where the swarm manager issues mixed real and probe tasks to UAVs, observes task completion delays and accuracy, and continuously revises beliefs about UAV legitimacy. Malicious insiders tend to conserve energy or degrade performance strategically. (2) A distributed collaborative trust evaluation aggregates trust assessments generated locally by multiple neighboring UAVs about a target node, using risk-minimization weighted fusion and temporal consistency constraints. This multi-source information fusion reduces noise and counters stealthy insiders.
For multi-hop penetration attacks, the proactive protection framework features: (1) formal logic-based reasoning information specification maps large raw vulnerability and configuration data into atomic facts using Datalog Horn clause logic to compress and structure relevant relations for efficient reasoning. (2) A multi-agent LLM collaboration architecture with distinct specialized agents handles attack path generation, deduplication, sub-path exploration, and result verification using voting to combat hallucinations. The system uses recursive sub-path exploration to improve coverage. Attack paths guide priority-based UAV network patching focusing on vulnerabilities with the highest exploit frequency and closest proximity to critical assets.
Evaluation uses a simulated UAV swarm over time with dynamic mobility and adaptive routing, measuring defense cost and overhead under GPS spoofing and multi-hop penetration attacks respectively. Six baselines compare defense strategies focusing on cooperation scope, feedback rules, or patching immediacy to the proposed approaches. Metrics include computational defense cost, overhead fluctuations, and resilience to insider UAVs. Visualized results in Figures 5 and 6 demonstrate superior cost and overhead efficiency. The paper does not specify hardware details or random seed strategies. No code or dataset releases are mentioned, limiting external reproducibility.
A concrete example: When a forged ground station initiates GPS spoofing targeting an edge UAV, geometric residuals between neighbors’ measured distances and suspicious UAV’s GPS reports trigger collaborative SDP position reconstruction. The Bayesian game at swarm level adjusts defense intensity while individual UAVs compute optimal collaborative communication ranges balancing cost and spoofing risk. Simultaneously, behavioral authentication probes UAVs dynamically for insider detection. The system combines multi-source data and game theoretic models in a rolling MPC controller to adaptively mitigate the attack with minimized resource use.
Technical innovations
- A double-layer game-theoretic model integrating an outer-layer Bayesian game and an inner-layer mean field game to optimize cooperative GPS spoofing defense across swarm and individual UAV levels.
- A trust-aware continuous behavioral authentication mechanism combining Bayesian posterior updates from probe-task behavioral signals with distributed swarm-level trust fusion for insider detection.
- An LLM-empowered multi-agent collaborative architecture for attack forensics that partitions reasoning responsibilities among specialized agents to reduce hallucinations and improve multi-hop penetration tracing.
- A formal logic-based vulnerability reasoning framework using Datalog Horn clauses to compress and structure massive UAV swarm security data for scalable attack path analysis and prioritized patching.
Datasets
- Simulated UAV swarm dataset — 500 UAVs, dynamic 3D Poisson distribution, 20% insiders — proprietary simulation environment
Baselines vs proposed
- Continuous Operation Strategy (COS): highest defense cost under GPS spoofing vs proposed: lowest defense cost (Fig. 5)
- Linear Feedback Strategy (LFS): intermediate, but overreacts causing higher cost vs proposed: lower defense cost (Fig. 5)
- Greedy Strategy (GS): moderate defense cost but lacks long-term coordination vs proposed: lower defense cost (Fig. 5)
- Formal Logic Strategy (FLS): exponential growth of overhead with attack path depth vs proposed multi-agent: stable low overhead (Fig. 6)
- Single-Agent Strategy (SAS): oscillatory overhead due to LLM hallucinations vs proposed multi-agent: smoother overhead (Fig. 6)
- Greedy Patching (GP): severe overhead spikes due to immediate patching vs proposed multi-agent: controlled adaptive patching (Fig. 6)
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.26876.
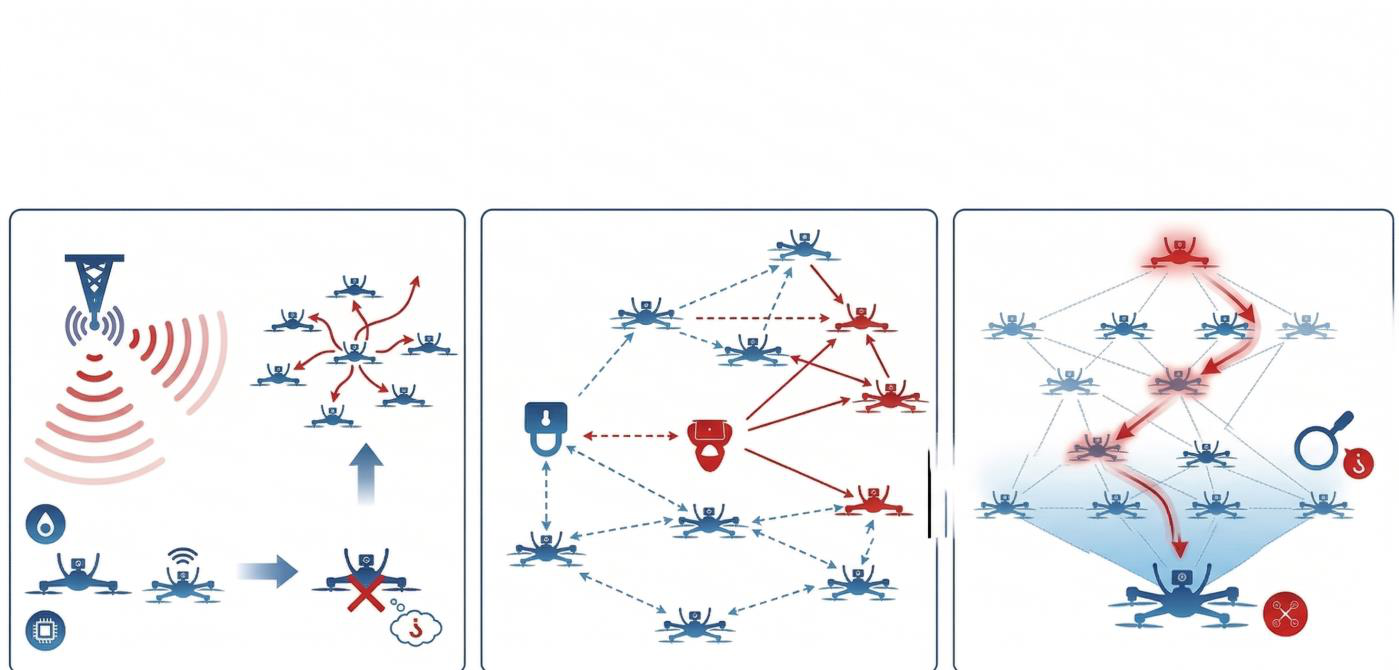
Fig 1: Overview of emerging security threats to UAV swarms and the cloud-
Fig 2: (a) System model of cooperative GPS spoofing defense for UAV swarms, and (b) its workflow: 1) collaborative position reconstruction and 2) optimal
Fig 3: (a) System model of dynamic behavioral authentication for UAV swarms, and (b) its workflow: 1) single-node behavioral authentication and 2)
Fig 4: Illustration of adaptive proactive protection for UAV swarms based on multi-agents, including (i) reasoning information specification, and (ii)

Fig 5: Evolution of instantaneous defense costs under GPS spoofing attacks
Fig 6: Evolution of instantaneous defense overhead under multi-hop pene-
Fig 7 (page 6).
Fig 8 (page 6).
Limitations
- Evaluation is based on simulated UAV swarm environments rather than real-world deployments.
- No explicit adversarial testing against adaptive or learning attackers beyond modeled GPS spoofing and penetration attack scenarios.
- Lack of detailed parameter sensitivity analysis or statistical significance testing in the results.
- No public release of code, data, or trained models limits reproducibility and independent verification.
- Potential latency and communication overhead of cloud-edge-end collaboration are not quantified.
- Scalability of LLM-based multi-agent attack forensics to larger swarms or real-time constraints remains unvalidated.
- The trust-aware behavioral model assumes availability of reliable behavioral signals, which may be noisy or spoofed.
Open questions / follow-ons
- How to efficiently implement distributed mixture-of-experts architectures for large-scale LLM inference across resource-constrained UAVs and edge nodes with latency and communication constraints?
- Designing lightweight privacy-preserving collaborative intelligence mechanisms balancing mission data confidentiality and swarm-level situational awareness.
- Extending multi-agent attack reasoning frameworks to handle real-time adaptive attackers with learning capabilities and evolving tactics.
- Evaluating the resilience and effectiveness of trust-aware behavioral authentication under data poisoning or strategic camouflage attacks targeting behavioral metrics.
Why it matters for bot defense
This work provides a comprehensive framework for securing dynamic, distributed autonomous agent networks, exemplified by UAV swarms, which shares design challenges with bot detection and CAPTCHA systems deployed to defend against stealthy, adaptive adversaries. Its multi-layer cooperative defense leveraging cloud-edge-end collaboration, game-theoretic adaptive resource allocation, continuous trust evaluation, and intelligent multi-agent forensics offers insights into architecting scalable, robust bot defenses that balance detection accuracy, resource costs, and real-time responsiveness under evolving attacker strategies. Bot-defense practitioners can draw on the cooperative perception and trust fusion approaches here for designing incentive-compatible, behavior-driven verification systems that resist insider tampering and free-riding. The multi-agent LLM reasoning system points to future directions of combining structured logic with large language models to trace long-chain, stealthy attack paths in complex networks. While UAV swarms are a physical cyber-physical domain, the conceptual security challenges and defense coordination strategies are directly analogous to distributed bot detection in large-scale online environments.
Cite
@article{arxiv2605_26876,
title={ Secure UAV Swarms in Low-Altitude Wireless Networks: Challenges and Solutions },
author={ Yuntao Wang and Haojia Yang and Han Liu and Jianle Ba and Zhou Su },
journal={arXiv preprint arXiv:2605.26876},
year={ 2026 },
url={https://arxiv.org/abs/2605.26876}
}