
Hand-in-the-Loop: Improving Dexterous VLA via Seamless Interventional Correction
Source: arXiv:2605.15157 · Published 2026-05-14 · By Zhuohang Li, Liqun Huang, Wei Xu, Zhengming Zhu, Nie Lin, Xiao Ma et al.
TL;DR
This paper addresses the challenge of improving dexterous manipulation policies for high-degree-of-freedom (DoF) robotic hands, where Vision-Language-Action (VLA) models suffer from compounding errors due to contact-rich dynamics and high-dimensional action spaces. Existing Interactive Imitation Learning (IIL) methods for policy refinement rely on human teleoperation takeover data but face the issue of sudden command mismatches, termed "gesture jumps," which cause unstable robot-hand configurations and grasp failures during interventions.
The authors propose Hand-in-the-Loop (HandITL), a seamless human-in-the-loop intervention framework that blends human corrective inputs with autonomous policy commands rather than fully switching control authority. HandITL introduces an optimization-based relative retargeting method for hand control, which anchors at the intervention moment and maps incremental human fingertip motions to the robot hand, minimizing discontinuities. For arm manipulation, a velocity-based shared control injects human residual twists into ongoing policy commands. This approach prevents abrupt command discontinuities, greatly reduces intervention jitters, and preserves dexterous manipulation capabilities after takeover.
Extensive real-world evaluations on bimanual dexterous robotic tasks involving tool use, assembly, and fine-grained manipulation demonstrate that HandITL reduces takeover-induced command discontinuity by up to 99.8%, decreases grasp failures by 87.5%, and shortens completion time by 19.1% compared to direct teleoperation takeover. Furthermore, fine-tuning policies with on-policy intervention data collected via HandITL outperforms finetuning with pure teleoperation data by approximately 19% on average across three long-horizon tasks. The results validate that seamless corrective control and targeted on-policy correction data significantly enhance robustness for contact-rich dexterous manipulation.
Key findings
- HandITL reduces takeover jitter by 99.8% compared to direct teleoperation takeover on the Bread Clip task, decreasing mean command discontinuity from approximately 4.38×10^-2 to 6.8×10^-5.
- HandITL reduces grasp failures by 87.5% and mean task completion time by 19.1% on the Pick Up and Place the Parts task relative to teleoperation-based intervention (42.8s vs. 52.9s).
- Post-takeover manipulation with HandITL achieves more consistent cross-operator completion times (5.6s gap) compared to teleoperation (18.0s gap), indicating improved robustness to operator variability.
- On long-horizon dexterous tasks, policies fine-tuned with HandITL intervention data outperform those trained with an equal amount of new teleoperation data by 19% average normalized sub-goal completion score.
- The velocity-based shared arm control and optimization-based relative hand retargeting preserve ongoing finger-object contacts, enabling stable bimanual manipulation after intervention, unlike Jacobian inversion or absolute teleoperation switches.
- Among intervention modes, copilot shared control yielding residual corrections while maintaining policy primacy achieves stronger policy improvement than full human takeover.
- The on-policy intervention correction data better covers out-of-distribution states caused by policy compounding errors than standard demonstration data collected offline.
- HandITL supports seamless high-DoF bimanual interventions, demonstrated on a 56-DoF system with two 21-DoF hands and 7-DoF arms.
Threat model
The adversary is implicit: the deployed VLA policy itself may cause failures due to compounding small errors leading to out-of-distribution states. The human operator intervenes when the policy is expected to fail. The adversary cannot override or manipulate the human operator, nor can it bypass the intervention interface. The focus is on mitigating policy brittleness through human-in-the-loop corrective inputs rather than external adversarial attacks.
Methodology — deep read
Threat Model & Assumptions: The setting involves deploying Vision-Language-Action (VLA) policies on a bimanual dexterous robotic system with high-DoF hands (21 DoF per hand) and 7-DoF arms. The adversary here is modeled implicitly as the policy's own errors accumulating over long-horizon contact-rich manipulation, resulting in out-of-distribution states where autonomous control may fail. Human operators intervene through teleoperation to correct the policy mid-rollout. It assumes the human operator can provide corrective inputs via VR controllers and data gloves but cannot directly control robots with perfect alignment, causing command mismatches at takeover.
Data Provenance and Setup: Experiments use a real robot platform consisting of two Franka Emika FR3 arms each equipped with a Bytedexter V2 hand (21 DoF). Human operator's hand and wrist motion are captured with Meta Quest 3 controllers (6-DoF wrist poses) plus Manus Quantum Metagloves (finger joint angles). Observations include multi-view RGB-D images and proprioceptive feedback. Intervention data is collected during policy rollouts where operators trigger corrective control using a foot pedal interface.
The intervention data covers fully autonomous rollouts interrupted by human corrective interventions under two modes: full takeover and copilot shared control. They collected 20 hours of teleoperation data and over 1 hour each of intervention data in both modes for policy fine-tuning.
- Architecture and Algorithm: HandITL integrates the autonomous policy commands (denoted π_base) with human corrections to produce the final executed command. At each timestep t:
- The policy outputs arm and hand commands a^π_t.
- The human input u^h_t is fused via two modules: a) Optimization-based relative hand retargeting maps incremental fingertip motion (difference from intervention start t0) onto robot hand joint space, using an optimization loss combining global shape preservation, precision pinch grasping, structural collision avoidance, and temporal smoothness. b) Velocity-based arm shared control converts human wrist motions into residual spatial velocity twists, which are injected additively (weighted by α parameters) onto the policy-predicted arm commands. This fusion allows a smooth blending of human intent and autonomous control, avoiding abrupt discontinuities.
Training Regime: Starting from a pre-trained GR-Dexter VLA policy, the authors fine-tune using datasets that mix the original teleoperation data with either new teleoperation data, or with on-policy correction data collected via HandITL under full takeover or copilot modes. Fine-tuning uses supervised learning, keeping hyperparameters consistent across experiments for fair comparison. Exact epochs or batch sizes are not detailed explicitly.
Evaluation Protocol: Three evaluation types:
- Takeover command discontinuity analysis quantifies abrupt command jumps at the intervention boundary across multiple trials comparing HandITL to Jacobian-based retargeting, delta-command retargeting, and direct teleoperation switching.
- Post-takeover manipulation capability evaluates task completion time, grasp stability, workspace resets, and operator consistency on two tasks (Pick Up and Place the Parts, Pick Up the Drill).
- Long-horizon policy evaluation tests sub-goal completion scores averaged over 10 rollouts on three complex bimanual tasks involving assembly and tool use. Policies fine-tuned with different data sources are compared.
- Reproducibility: Code and datasets are not explicitly stated as released. The 56-DoF robot platform and VR glove telemetry setup are described, but these hardware configurations may limit reproducibility. Mathematical formulations for optimization-based retargeting are detailed for clarity. The paper includes extensive ablations across intervention methods but no cross-validation or randomized controlled experiment design is described.
Technical innovations
- Optimization-based relative hand retargeting minimizes hand command discontinuities by anchoring to the intervention start and mapping incremental human fingertip motion, rather than absolute poses, onto the robot hand.
- Velocity-based shared arm control injects human residual wrist velocity twists as localized corrections while preserving the policy's ongoing arm commands, preventing long-term drift.
- A dual intervention interface supporting both full human takeover and copilot shared control modes for flexible seamless corrective interventions during dexterous VLA policy rollouts.
- Demonstrating that training with high-dimensional on-policy correction data from the HandITL interface significantly outperforms standard teleoperation demonstration data for long-horizon dexterous tasks.
Datasets
- Teleoperation Dataset — 20 hours — real-world bimanual robot rollouts collected via direct teleoperation
- On-policy Intervention Dataset — 1 hour each for Full Takeover and Copilot Shared Control modes — collected during real robot policy rollouts with human correction using HandITL
Baselines vs proposed
- Direct Teleoperation Switching: Mean takeover command jump = ~4.38 ×10^-2 vs HandITL relative retargeting: ~6.8 ×10^-5 (99.8% reduction) on Bread Clip task
- Pick Up and Place the Parts task - Completion Time: Teleop = 52.9 s vs HandITL Relative = 42.8 s (19.1% reduction)
- Pick Up and Place the Parts task - Grasp Failures: Teleop reduced by 87.5% using HandITL relative intervention
- Long-horizon task average Sub-goal Completion Score: Base Teleop = 0.71, Teleop_new = 0.77, Copilot = 0.90, Full Takeover = 0.89
- Jacobian retargeting baseline vs HandITL Relative method shows similar low command jitter but HandITL avoids Jacobian inversion complexity
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.15157.

Fig 1: Overview of HandITL. (a) The gesture mismatch between human hand and robot hand at intervention
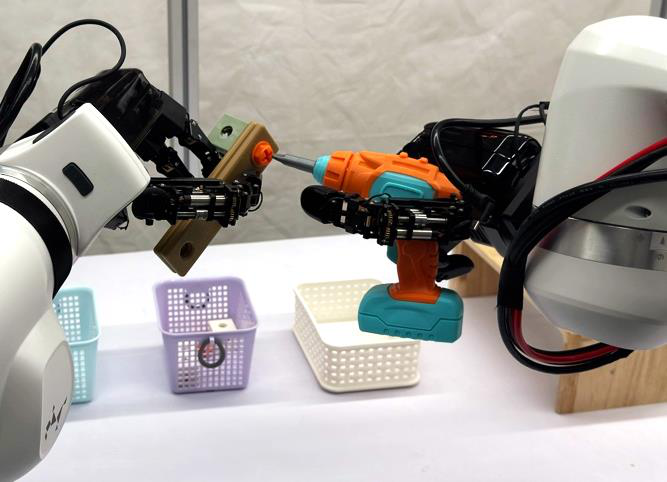
Fig 2: Architecture of the seamless interventional method. (a) The base VLA policy (πbase) generates
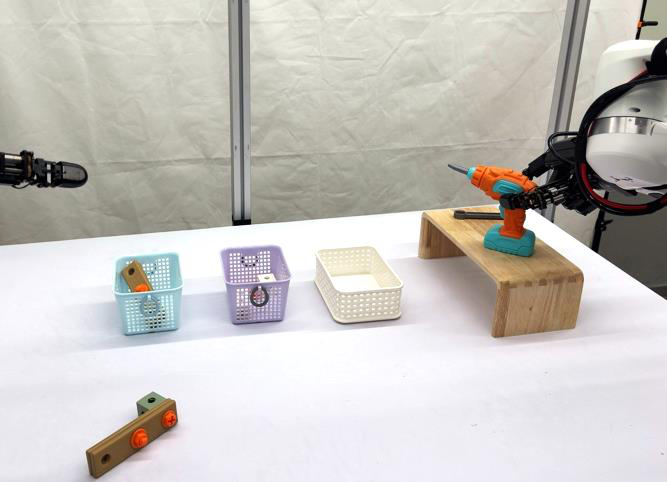
Fig 3 (page 2).

Fig 4 (page 2).

Fig 5 (page 2).
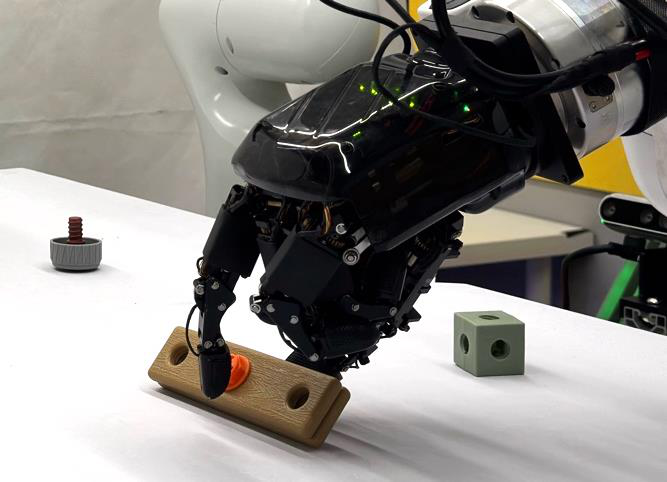
Fig 6 (page 2).
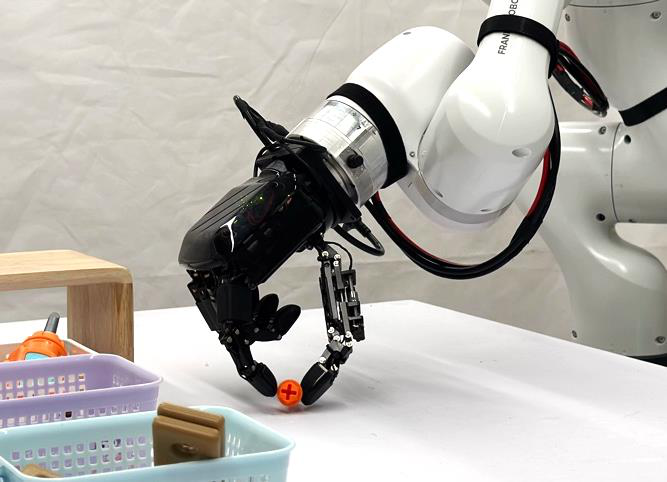
Fig 7 (page 2).
Fig 8 (page 2).
Limitations
- Post-training uses simple supervised fine-tuning; intervention data may contain suboptimal or noisy corrective actions.
- High-precision millimeter-scale alignments (e.g., drill bit positioning) remain challenging, limited by RGB-D vision resolution and occlusions.
- Hardware and sensor requirements (VR gloves, multiple RGB-D cameras) limit accessibility and reproducibility for wider research adoption.
- Potential operator adaptation variability to relative retargeting may influence intervention effectiveness across different humans.
- No formal adversarial evaluation or robustness to adversarial perturbations is presented.
- Evaluation focuses on a specific bimanual dexterous platform; generalization to other robots or simpler effectors is unexplored.
Open questions / follow-ons
- How to effectively filter or weight human intervention data to remove suboptimal or noisy corrective actions for better policy fine-tuning?
- Could integrating tactile sensing and force feedback better support millimeter-level precision manipulation in future extensions?
- What are the tradeoffs between full takeover and copilot shared control across a broader range of task complexities and operators?
- How does the approach generalize to other robotic platforms and varying sensory modalities beyond RGB-D and VR gloves?
Why it matters for bot defense
Bot-defense and CAPTCHA practitioners working on robotic system authentication or human-in-the-loop verification could apply HandITL principles to ensure smoother transitions between autonomous decision-making and human oversight, minimizing abrupt control changes that may trigger failures or raise suspicion. The key insight—blending corrective human intent as residual inputs rather than abrupt command switches—can inspire seamless intervention interfaces for other high-dimensional control problems where manual override must be smooth. Furthermore, the data collection technique of blending human corrections to augment policy training on out-of-distribution states aligns with reinforcement mechanisms to harden bot-detection models through recoverable failure modes. Finally, the use of relative retargeting to reduce configuration jumps could inform gesture or behavioral biometric analyses that underpin CAPTCHA robustness against bot imitations in physical or virtual environments.
Cite
@article{arxiv2605_15157,
title={ Hand-in-the-Loop: Improving Dexterous VLA via Seamless Interventional Correction },
author={ Zhuohang Li and Liqun Huang and Wei Xu and Zhengming Zhu and Nie Lin and Xiao Ma and Xinjun Sheng and Ruoshi Wen },
journal={arXiv preprint arXiv:2605.15157},
year={ 2026 },
url={https://arxiv.org/abs/2605.15157}
}