
Distill: Uncovering the True Intent behind Human-Robot Communication
Source: arXiv:2605.14262 · Published 2026-05-14 · By Ting Li, David Porfirio
TL;DR
This paper addresses a fundamental problem in human-robot interaction: how to accurately capture the user's true intent when specifying tasks for autonomous robots. Existing paradigms, primarily natural language (NL) commands and end-user programming (EUP) traces, suffer from being either ambiguous and imprecise (NL) or overly specific and brittle to context changes (EUP). The Distill approach proposes a structured multi-phase interaction pipeline that guides users from their initial task specification to a minimal, abstract, and partially ordered set of critical actions capturing their ground-truth intent. Distill removes redundant steps, generalizes individual actions to goal outcomes, and relaxes ordering constraints, enabling more flexible and robust robot task execution.
Implemented as a web interface, Distill was evaluated through a crowdsourced user study in a simulated hospital environment, involving 61 participants across structured and open-ended task conditions. Results demonstrate that Distill effectively helps users refine initial imprecise or overly detailed input into concise, goal-oriented specifications. Participants were able to validate and override automated filtering, abstract critical actions into goals, and specify temporal flexibility, ultimately eliciting a clearer representation of what users truly meant. The work contributes a novel framework and practical insights for designing interactive systems that improve intent elicitation in human-robot communication.
Key findings
- Distill filtered out 30-40% of non-critical actions from user-specified traces on average, simplifying task plans significantly.
- Over 85% of participants found the filtering phase (Phase 3) helpful in clarifying redundant or unnecessary steps in their instructions.
- Participants abstracted a median of 60% of actions to goal-level outcomes in Phase 4, indicating willingness to delegate execution details to the robot.
- Temporal grouping in Phase 5 showed that 70% of users relaxed strict ordering constraints between task goals, enabling flexible execution.
- In the structured condition, participants converged toward a known ground-truth intent by progressively refining input through Distill phases.
- User overrides of system-designated critical/non-critical actions occurred in approximately 25% of cases, underscoring the value of mixed-initiative validation.
- Natural language input tended to be longer and more ambiguous compared to hand-crafted traces, highlighting the importance of stepwise refinement.
- Qualitative feedback revealed users valued Distill’s ability to reveal implicit priorities and clarify unclear instructions they initially provided.
Threat model
The work assumes non-adversarial use cases in which uncertainty arises primarily from user-imprecise communication and environmental variability. Adversaries do not deliberately manipulate instructions or observations. Instead, the threat is unintentional ambiguity and redundancy that leads to inefficient or incorrect robot behavior. The robot cannot rely solely on inference and benefits from user-involved intent clarification. There is no threat model involving malicious attackers.
Methodology — deep read
Threat Model & Assumptions: The adversary considered here is environmental or contextual uncertainty that can make rigid robot execution plans brittle or inefficient. The system assumes users provide imperfect initial task specifications via natural language or stepwise traces, which are ambiguous or over-specified but genuine expressions of intent. The problem is not adversarial attacks but intent uncertainty.
Data: The experiments involved 61 participants recruited via Prolific who interacted with a web interface simulating a hospital environment. Each participant specified one task scenario via Distill’s five-phase process. Data collected included natural language descriptions, hand-crafted procedural traces, filtered and abstracted traces, ordered groupings of goals, and participant feedback. Exact dataset sizes and task distributions are not detailed beyond this single-session design.
Architecture/Algorithm: Distill consists of five phases:
- Phase 1: User inputs an initial natural language task description.
- Phase 2: User creates a detailed step-by-step action trace from a predefined library of parameterized robot primitives.
- Phase 3: The system filters out non-critical (redundant or inferable) actions from the trace using a classical symbolic reverse planning algorithm that analyzes dependencies and goals, producing a minimal trace. Users can override these designations.
- Phase 4: User abstracts each critical action to specify whether the exact action must be performed or only its outcome achieved, expressing flexibility.
- Phase 5: User groups and prioritizes goals to specify allowable execution order or parallelism, relaxing strict ordering assumptions.
Training Regime: Not applicable as the system relies on symbolic planning and user interaction rather than trained machine learning models. Phases rely on software infrastructure built in React for the frontend and Python backend performing symbolic filtering.
Evaluation Protocol: The study employed both structured and open-ended task conditions. In the structured condition, the ground-truth task intent was known, allowing assessment of users’ convergence toward this truth via Distill phases. Metrics included the amount of filtering achieved, frequency of user overrides, abstraction rates, temporal grouping usage, and qualitative feedback. No formal statistical tests are reported. The environment and object layouts were controlled and consistent across participants.
Reproducibility: The Distill interface is implemented as a web app with a described frontend and backend architecture, but no public code or datasets are referenced. The paper includes a symbolic algorithm description in appendix but no open-source code release is documented.
Example end-to-end: A nurse instructs a robot to "deliver medication to patient in ICU." Initially, the user’s natural language and trace may include steps like "moveTo(pharmacy), grab(medication), moveTo(ICU), handoff(medication, patient)." Distill’s filter phase removes explicit moves that are implied by subsequent actions, such as moveTo(pharmacy), then enables abstraction where the user indicates only the outcome “patient has medication” matters, not specific exact movements. The grouping phase allows relaxed order constraints where delivery to multiple patients can be done flexibly. The resulting distilled plan is minimal, flexible, and captures true intent clearly.
Technical innovations
- A multi-phase human-in-the-loop pipeline that progressively refines natural language and procedural traces into minimal, abstract, and partially ordered task specifications.
- A symbolic reverse planning-based filtering technique to remove non-critical user-specified actions inferred from robot autonomy.
- Manual user abstraction of actions to goal-level postconditions, enabling flexibility in how task outcomes are achieved by the robot.
- An interface for specifying temporal goal groupings that relax ordering constraints, allowing parallel or non-sequential execution consistent with user intent.
Baselines vs proposed
- Natural language initial input: average trace length = 10.3 steps; after Distill filtering: 6.5 steps (~37% reduction)
- User overrides on filtering decisions: 25% of filtered actions re-classified as critical by users
- Abstraction rate from filtered trace to goals: median 60% of actions abstracted
- Temporal grouping usage: 70% participants indicated flexible ordering in at least one goal group
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.14262.
Fig 1: The Distill approach to eliciting ground-truth user input from natural task specification paradigms.
Fig 2 (page 1).
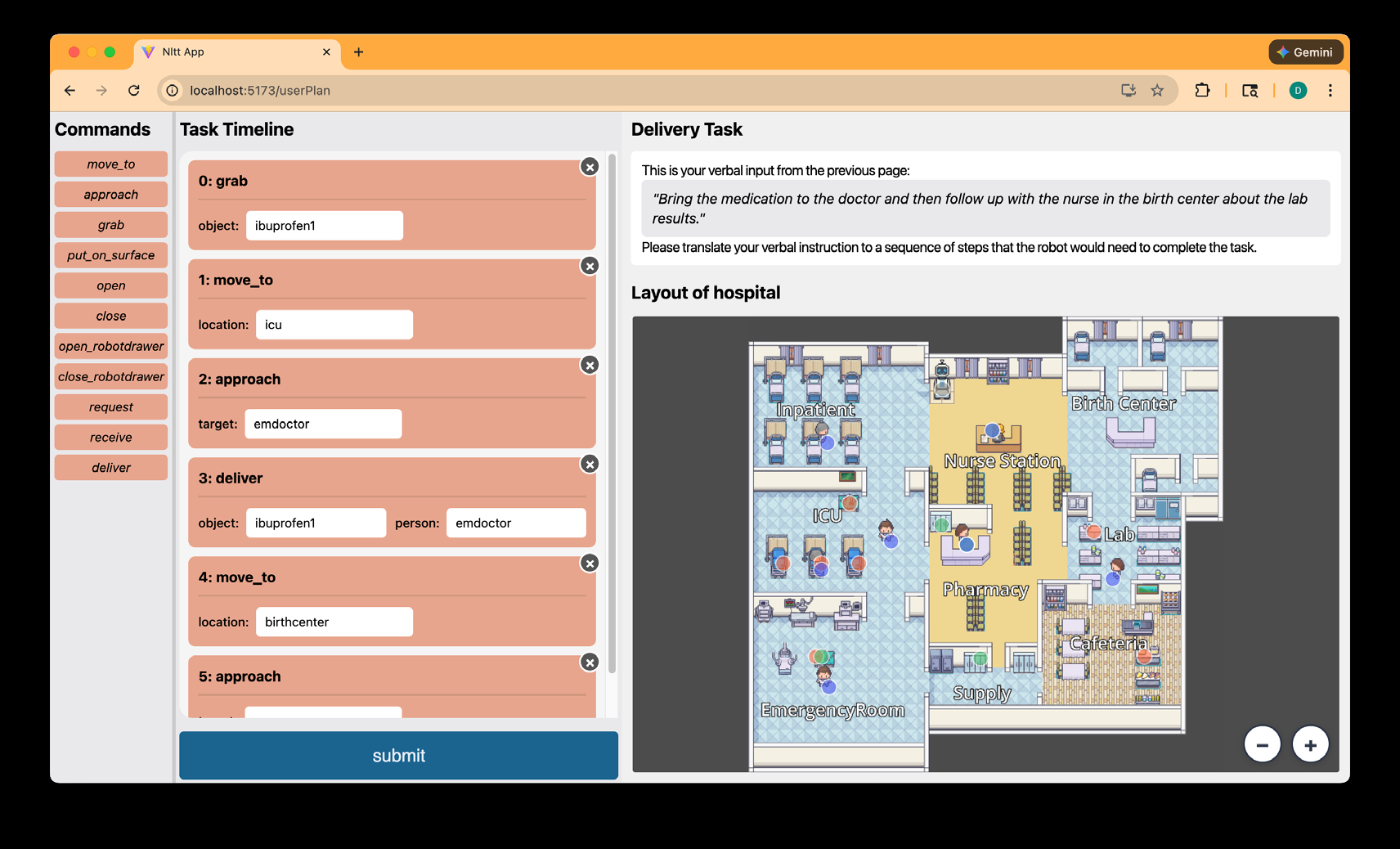
Fig 4: Our implementation of the first and second phases of the Distill approach. The map uses graphics from LimeZu [1].
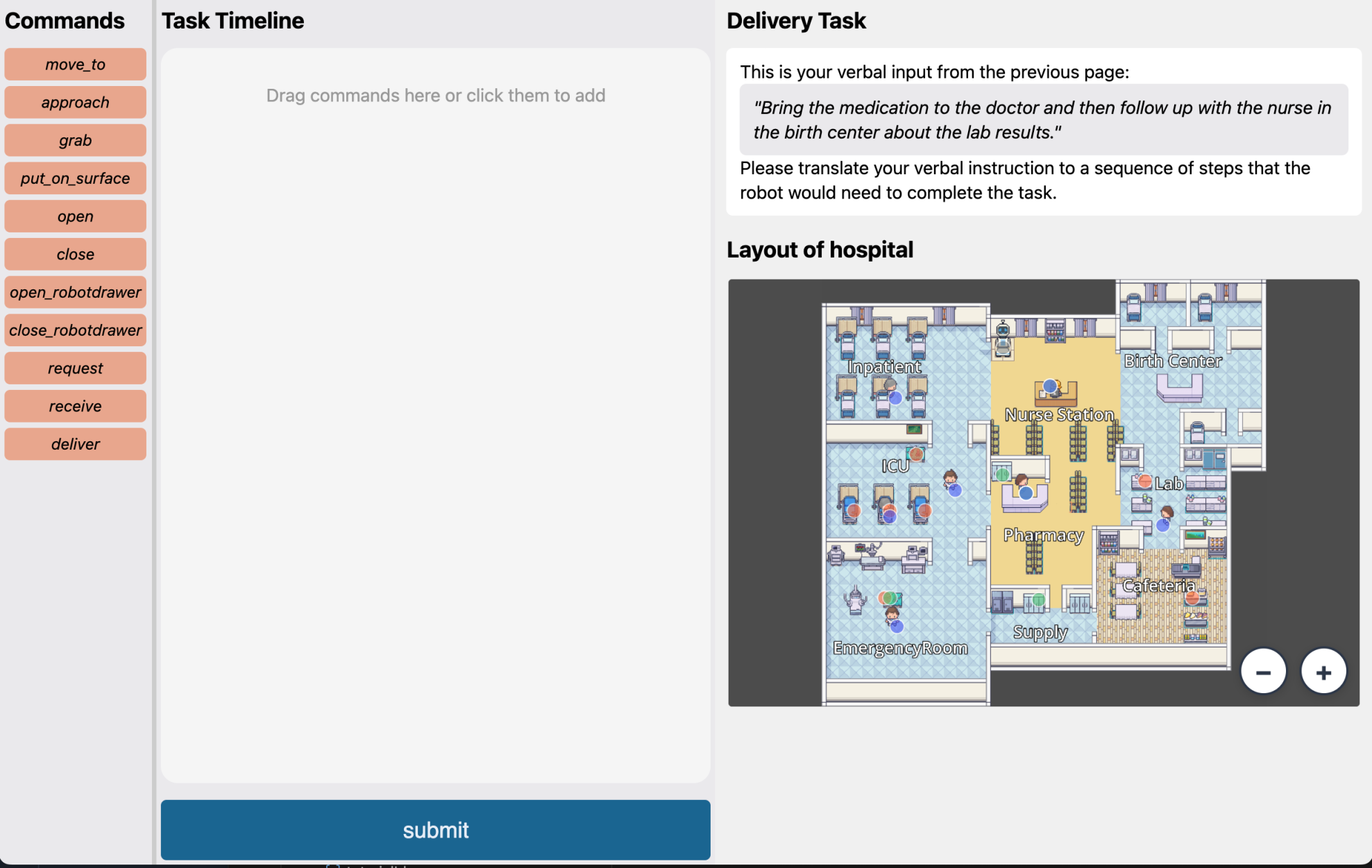
Fig 5: Our implementation of the third, fourth, and fifth
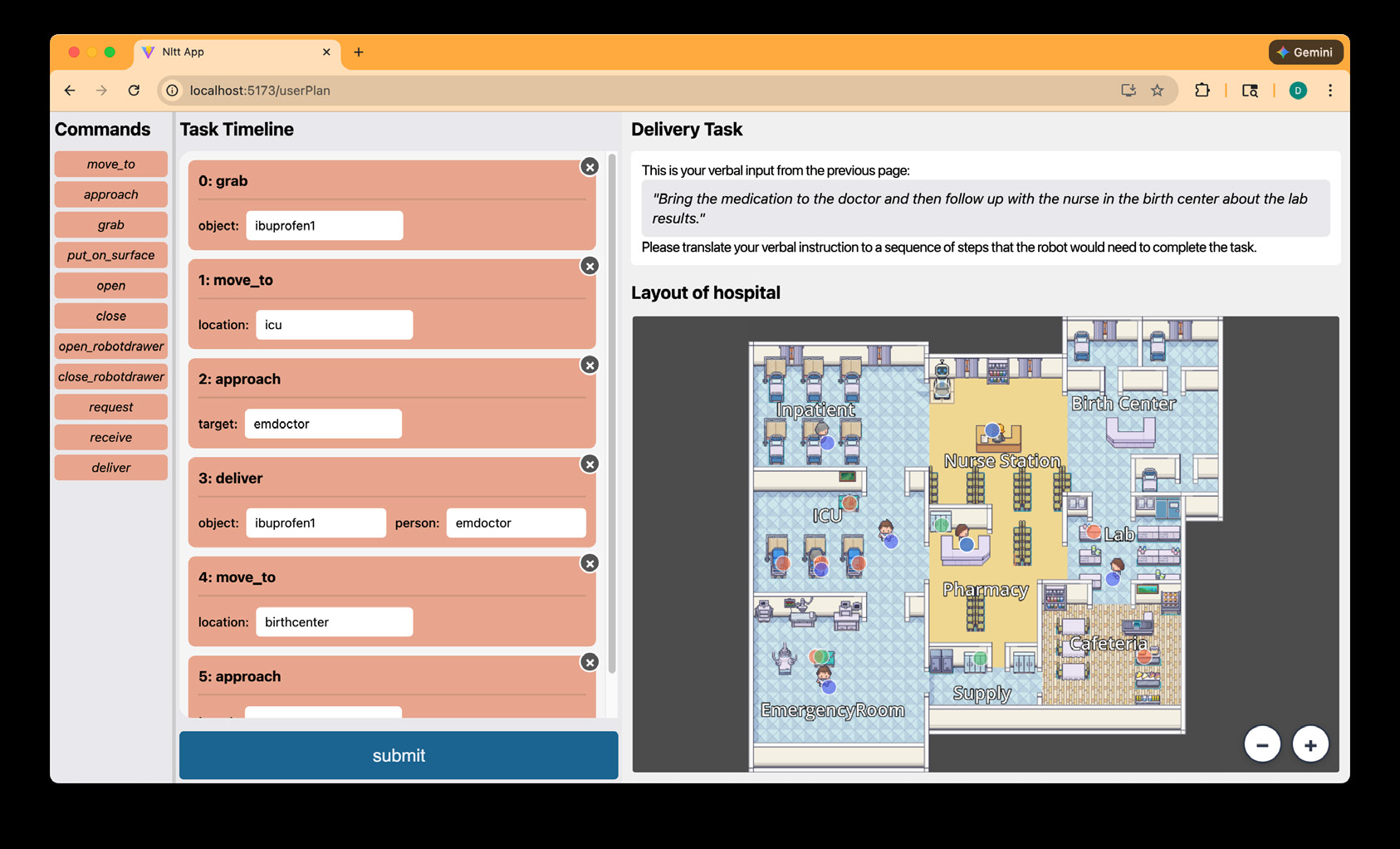
Fig 3: Distill’s third phase (left) involves filtering non-critical actions from the user’s initial task trace. Distill’s fourth phase
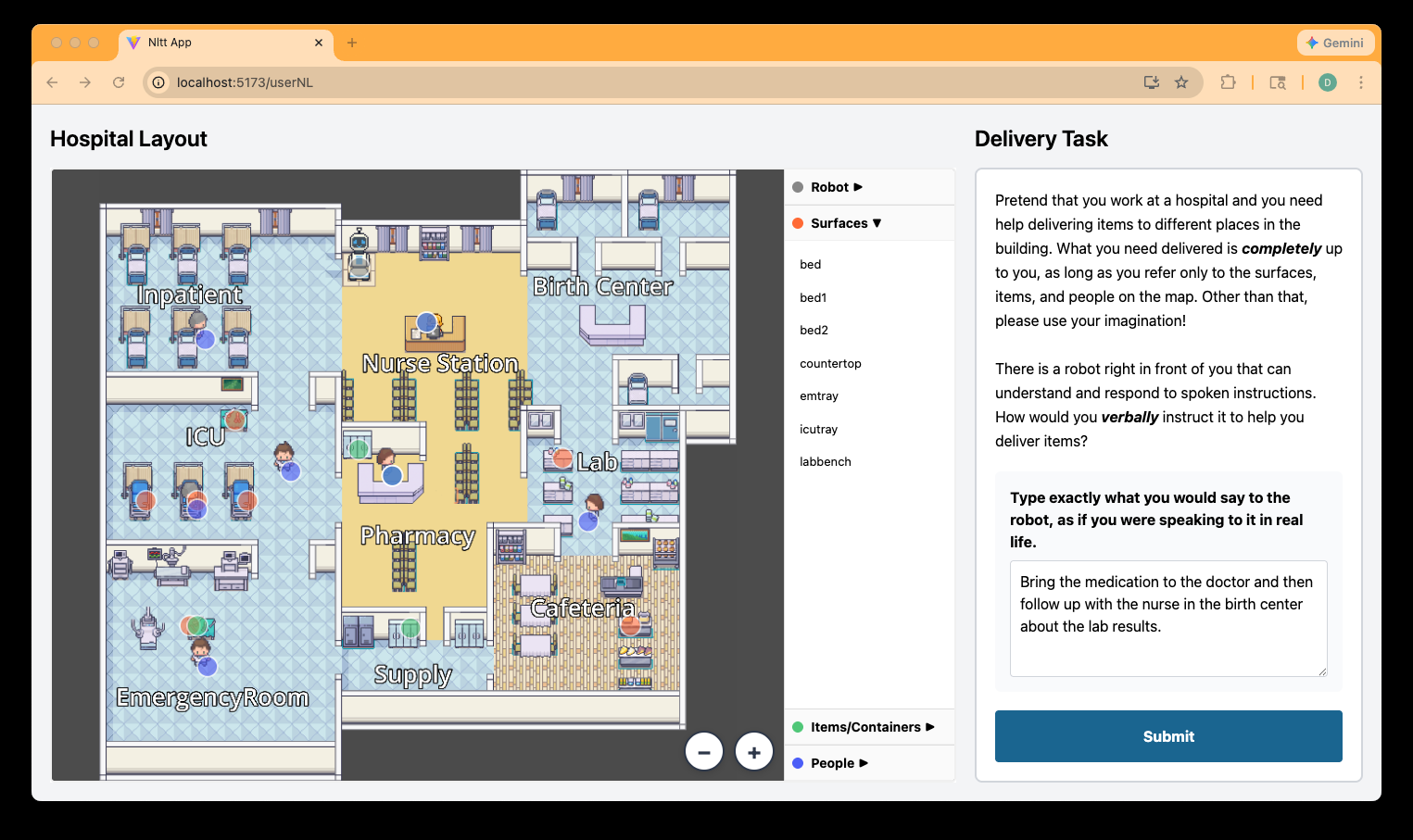
Fig 6: Comparison of natural language input length (left) and of the different lexical features occurring (right) between the
Fig 7 (page 6).
Fig 8 (page 6).
Limitations
- Study limited to a single simulated hospital environment scenario; results may not generalize to other domains with different task complexities.
- No formal quantitative evaluation against fully autonomous robot planning or large language model-based intent inference baselines.
- Relies on user willingness and ability to engage in multi-step refinement phases, which may not be feasible in time-sensitive applications.
- Filtering phase uses a symbolic reverse planner rather than learned or adaptive methods; may not handle domain extensions without engineering.
- No reported robustness testing under distributional shifts, noisy or ambiguous user input, or adversarial manipulations.
- Code and datasets are not publicly released, limiting immediate reproducibility.
Open questions / follow-ons
- How to integrate Distill’s pipeline with real-time dialog systems for continuous human-robot interaction rather than one-shot task specification?
- Can learned models (e.g., LLMs) be reliably incorporated to automate filtering and abstraction phases while incorporating user feedback?
- How does Distill perform across diverse, real-world robot domains with more complex goal structures and environments?
- What is the impact of Distill on long-term robot autonomy, user trust, and task success in longitudinal deployments?
Why it matters for bot defense
For bot-defense and CAPTCHA practitioners, the Distill approach offers a valuable paradigm of mixed-initiative intent clarification that separates noisy and ambiguous user input from critical goal specifications. While not directly about CAPTCHAs or bot detection, Distill’s method of progressive refinement and abstraction could inform designing interactive challenges that elicit clear user intent even under uncertain or incomplete requests. For bot-defense, similar pipelines might disambiguate genuine human actions from scripted bots by asking users to validate or abstract input sequences. Distill also demonstrates the importance of allowing flexible temporal orderings and minimal essential steps, principles that could guide the design of more robust and user-friendly authentication or task-verification flows that adapt to humans’ imperfect communication rather than requiring brittle exactness.
Cite
@article{arxiv2605_14262,
title={ Distill: Uncovering the True Intent behind Human-Robot Communication },
author={ Ting Li and David Porfirio },
journal={arXiv preprint arXiv:2605.14262},
year={ 2026 },
url={https://arxiv.org/abs/2605.14262}
}