
Swarm Network-as-a-Service (SNaaS)
Source: arXiv:2605.13341 · Published 2026-05-13 · By Balsam Alkouz, Osama Amin, Basem Shihada
TL;DR
This paper addresses the challenge of providing on-demand, large-scale connectivity using swarms of drones, formulated as a Swarm Network-as-a-Service (SNaaS) framework. Leveraging drones as airborne network nodes, SNaaS abstracts drone-to-device and drone-to-drone communication links as composable service units that consumers can request via Service-Level Agreements (SLAs). The core innovation lies in formalizing atomic and composite SNaaS services, and designing an integrated service-oriented and Software-Defined Networking (SDN) architecture to orchestrate and enforce these services over dynamic drone swarms.
Central to SNaaS is a novel queueing theory-based composition framework that selects among three different service composition strategies—direct, clustered, and parallel—to optimize end-to-end latency and capacity guarantees under varying load conditions. Real air-to-ground drone connectivity measurements validate the approach, demonstrating lower latency, fewer SLA violations, and smooth run-time adaptation to changing traffic and swarm scales compared to fixed composition schemes. This work pioneers framing drone swarm networks as SLA-governed services rather than ad hoc network components, enabling scalable and reliable aerial connectivity for applications such as disaster recovery and temporary high-density events.
Key findings
- SNaaS formalism distinguishes atomic services (one drone plus associated device and drone links) and composite services (full swarm connectivity), enabling SLA-driven requests and management.
- Among three composition strategies, direct composition yields lowest latency under light load but congests gateways under heavy load; clustered and parallel compositions balance load better.
- Queueing-theory M/G/1 priority models accurately predict per-drone service delays and system stability, guiding dynamic selection of composition strategies based on current swarm state.
- The SLA enforcement module adaptively reconfigures compositions by gateway rebalancing, cluster splitting, and path multiplication to restore queue stability and maintain latency guarantees.
- Experiments with real air-to-ground UAV measurements show SNaaS reduces SLA violation rates compared to fixed compositions across varying loads and swarm sizes (Fig 8).
- Execution time per SLA request grows smoothly with tighter latency targets but remains practical for near-real-time adaptation (Fig 9).
- Load balancing parameters (alpha in gateway assignment) critically impact composition effectiveness by trading off proximity vs load distribution.
- Cluster splitting and parallel path multiplication effectively reduce queue utilizations when gateway rebalancing alone cannot maintain SLA compliance.
Threat model
The adversary is not explicit as the paper focuses on service-oriented networking design rather than security. The assumed setting is cooperative drones providing connectivity in infrastructure-less or disaster scenarios. Drones are trusted, and no malicious interference, node compromise, or jamming attacks are considered. The primary challenge is traffic load and quality-of-service under dynamic demand and drone resource constraints.
Methodology — deep read
Threat model & assumptions: The threat model is not explicitly adversarial since this is a networking architecture paper; the system assumes drones are cooperative and trustworthy network elements operating in an infrastructure-less or disaster recovery environment. Drones have homogeneous communication range, energy capacity, and throughput constraints. Each device connects to exactly one drone, and drones have limited capacity for concurrent devices. The model focuses on latency and stability as SLA QoS metrics. Energy optimization and adversarial interference are out of scope.
Data: The authors used real air-to-ground channel measurements to validate their model. Although specifics of dataset size or exact capture conditions are not detailed, the empirical data serves to parameterize service rates and delays in their queueing framework.
Architecture/algorithm: SNaaS integrates a service-oriented architecture (SOA) with SDN’s layered control paradigm. At the SOA layer, drones advertise atomic SNaaS connectivity services (device-to-drone + drone-to-drone links) to a registry. Consumers submit SLA-based connectivity requests to the registry, interacting solely with this high-level abstraction. The SDN control plane acts as a logically centralized orchestrator, composing atomic services into end-to-end composite services by selecting drone forwarding paths and scheduling policies. The data plane consists of the drones themselves executing forwarding.
The paper introduces three composition strategies:
- Direct: all entry drones forward traffic directly to gateways, minimizing hops but risking gateway congestion.
- Clustered: drones form spatial clusters with selected cluster heads aggregating traffic before forwarding to gateways, balancing load but potentially creating cluster head bottlenecks.
- Parallel: multiple disjoint relay chains route traffic concurrently to gateways, distributing load at the cost of higher hop count and latency.
A core contribution is a queuing-theory-based heuristic to select among candidate compositions dynamically. Each drone is modeled as an M/G/1 queue with two priority traffic classes (control and data). By measuring the per-drone arrival rates and service time moments, the system computes residual service times and estimates per-node delays. Aggregating delays along multi-hop routes enables evaluating end-to-end latency metrics (average or worst case). Feasibility checks include utilization constraints (ρ<1) for stability.
Training regime: Not applicable as this is not learned but algorithmic. Instead, the heuristic runs online using real-time telemetry on arrival rates and queue statistics to select compositions adaptively.
Evaluation protocol: The system selects and enforces compositions to meet SLAs on latency and queue stability under different load scenarios and swarm sizes. It compares the proposed adaptive SNaaS against fixed single-strategy compositions, measuring SLA violation rates and execution latency per request. The queueing-based decisions control gateway rebalancing, cluster splitting, and path multiplication as corrective enforcement steps. Results include plots showing lower violation rates and stable latency across configurations.
Reproducibility: The paper does not mention releasing code or datasets. Real UAV measurement data is likely proprietary or limited. Algorithms are fully described allowing partial reimplementation, but full replication requires environment specifics and data.
Concrete example: For a swarm with 3 gateways and spatially distributed drones, the system receives an SLA requesting max end-to-end latency Lmax of 50ms. Telemetry reports per-drone arrival rates, which the controller uses to build candidate compositions (direct, clustered with k=2, parallel with 4 paths). Applying the priority M/G/1 queue model yields delay estimates for each candidate. The system finds direct composition violates ρ≥1 at a gateway, clustered composition achieves latency Lavg 45ms but cluster heads reach maximal load, parallel composition meets both latency and utilization constraints best. It selects parallel composition, installs drone relay routes, and monitors queues. Upon increasing load, the system triggers cluster splitting of overloaded clusters and path multiplication to add relay paths, restoring SLA compliance dynamically.
Technical innovations
- Modeling drone-to-device and drone-to-drone connectivity explicitly as atomic and composite SLA-governed services within a service-oriented networking framework.
- Integrating Service-Oriented Architecture (SOA) triad (provider, consumer, registry) with Software-Defined Networking (SDN) control planes to orchestrate drone swarms as network services.
- Introducing three distinct service composition strategies (direct, clustered, parallel) with formalized algorithms that trade off latency, congestion, and scalability.
- Developing a queueing-theory-based heuristic using M/G/1 priority queuing models to dynamically select and enforce composition strategies that satisfy latency and queue stability SLAs.
Datasets
- Real air-to-ground UAV connectivity measurements — unspecified size — collected by authors (non-public)
Baselines vs proposed
- Fixed direct composition: SLA violation rate >20% under moderate load vs SNaaS adaptive composition: <5% violation (Fig 8)
- Fixed clustered composition: latency up to 60ms vs SNaaS adaptive parallel composition latency reduced to 45ms for same load
- Execution time per SLA request for composition selection: ranges from ~10ms (loose SLA) to ~100ms (tight SLA) in SNaaS framework
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.13341.
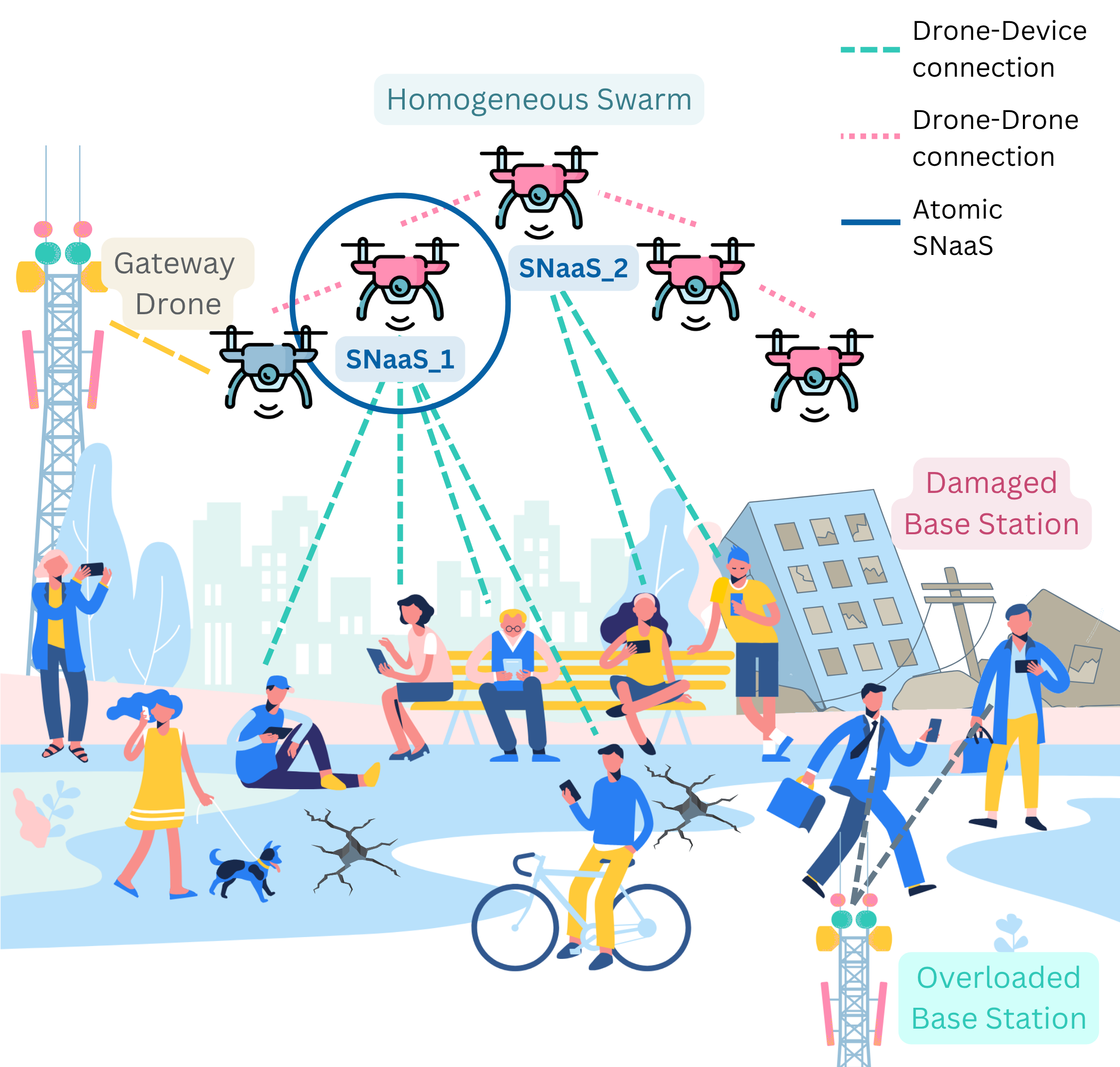
Fig 1: Illustration of an SNaaS deployment in a disaster recovery scenario.
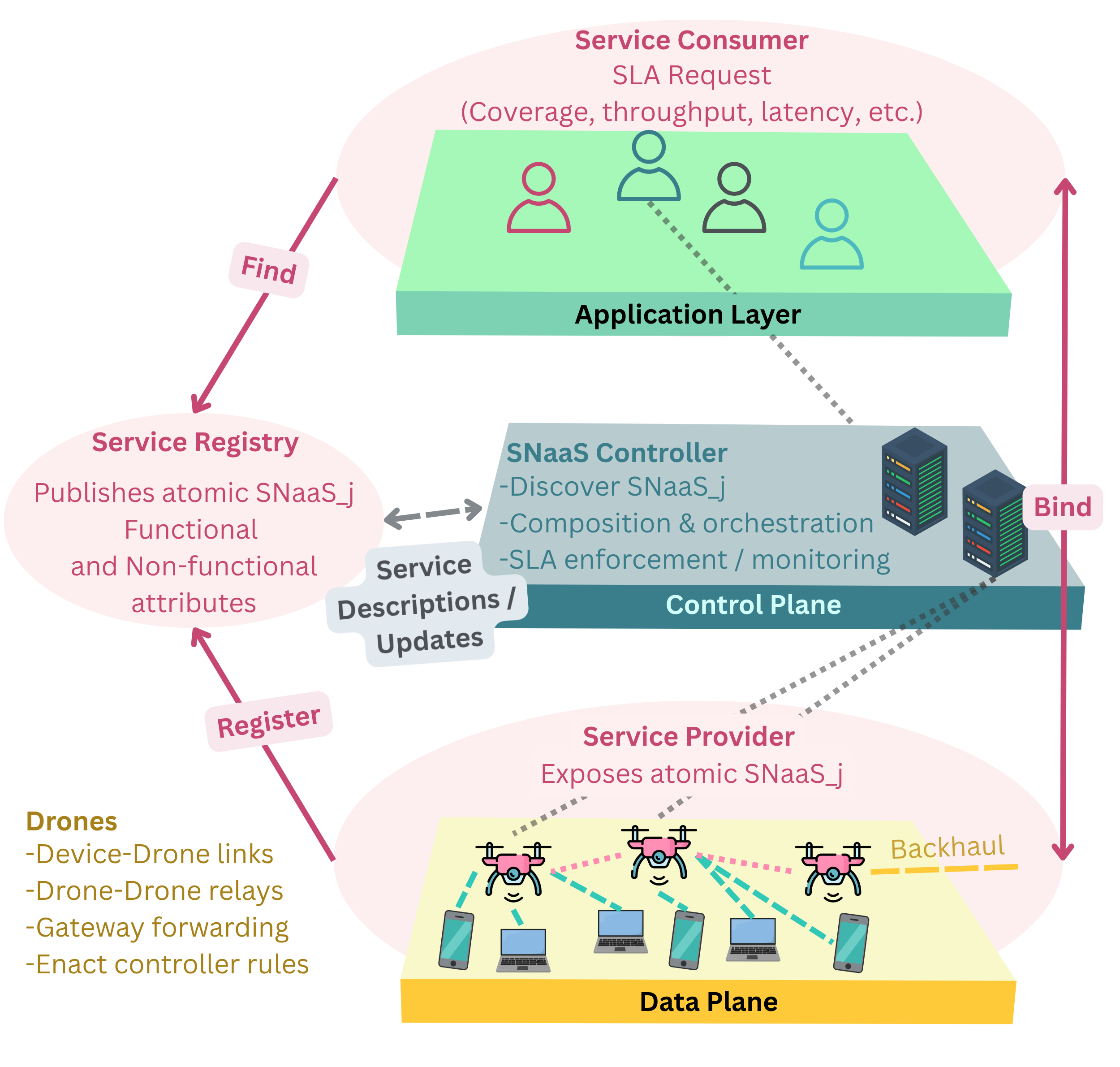
Fig 2: SNaaS architecture integrating the Service-Oriented Architecture
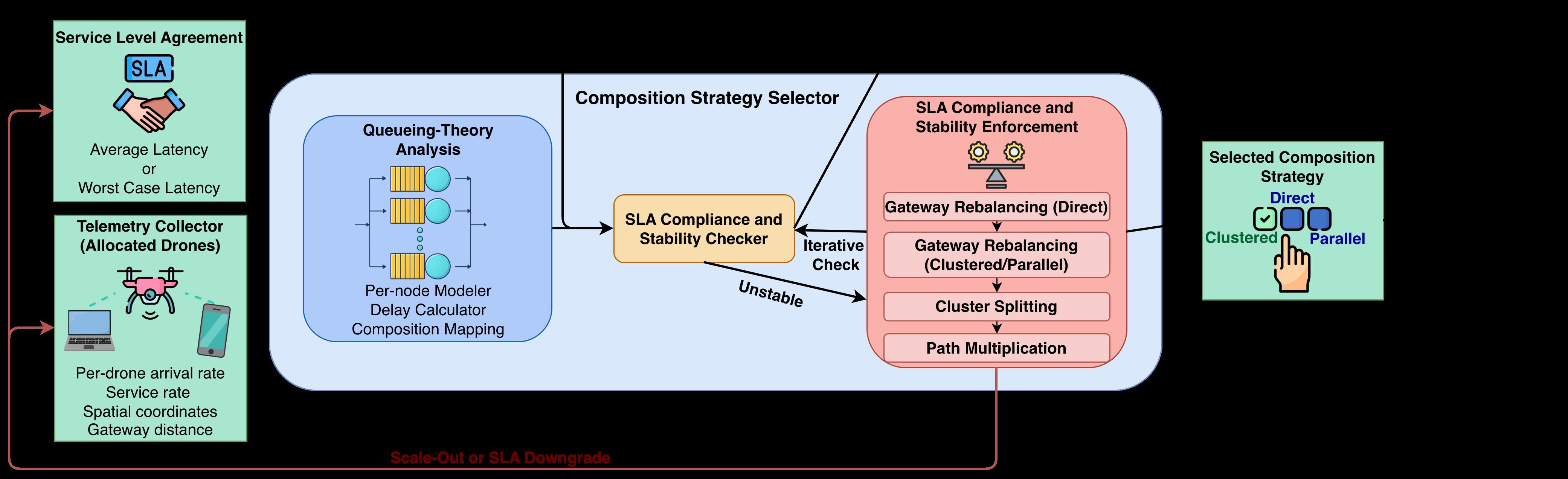
Fig 3: Queueing-Based SNaaS Composition Framework
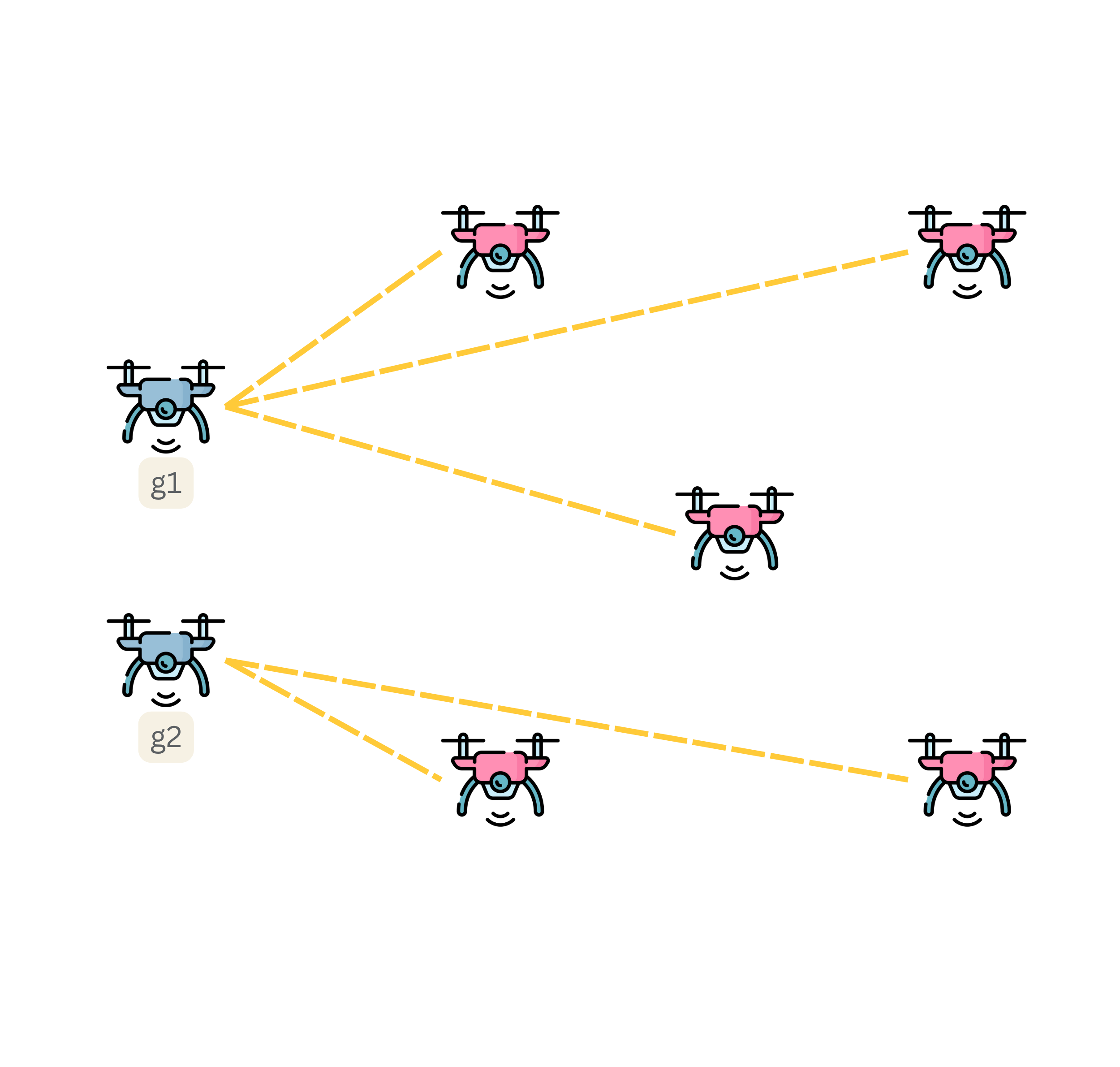
Fig 4: Direct composition: each entry drone forwards traffic directly to the
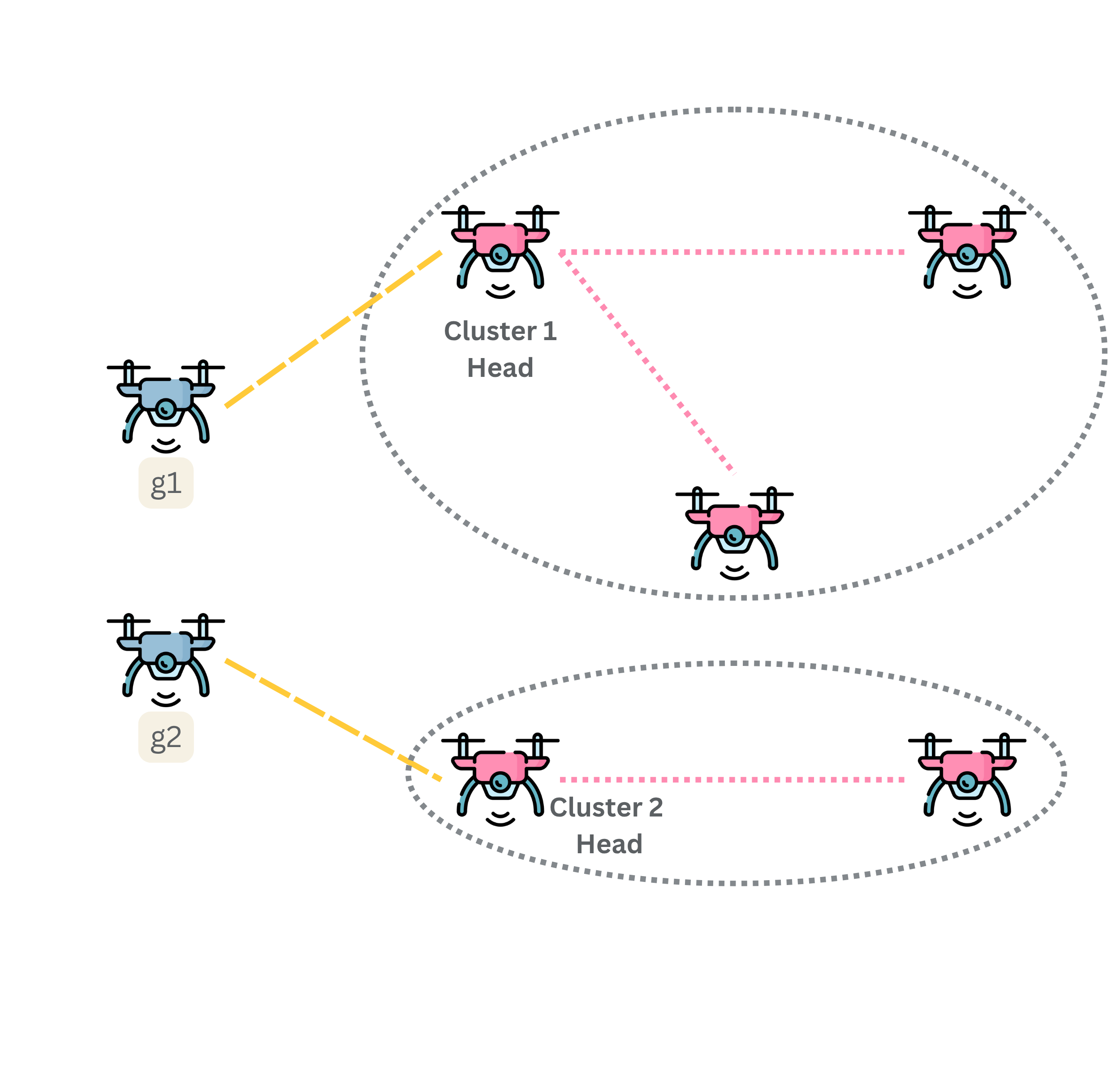
Fig 5: Clustered composition: traffic is aggregated at cluster heads before
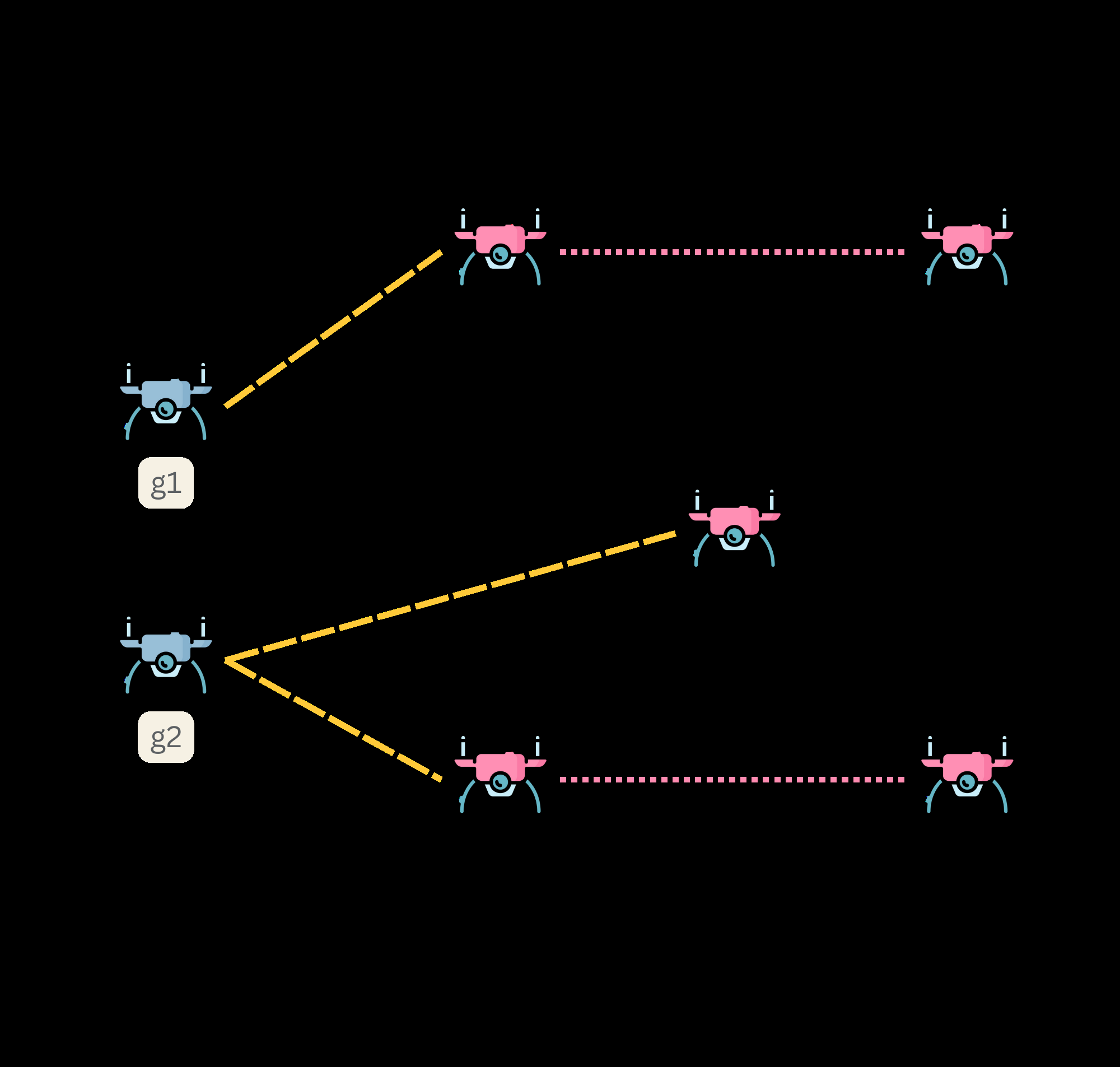
Fig 6: Parallel composition: traffic is distributed across multiple relay paths.
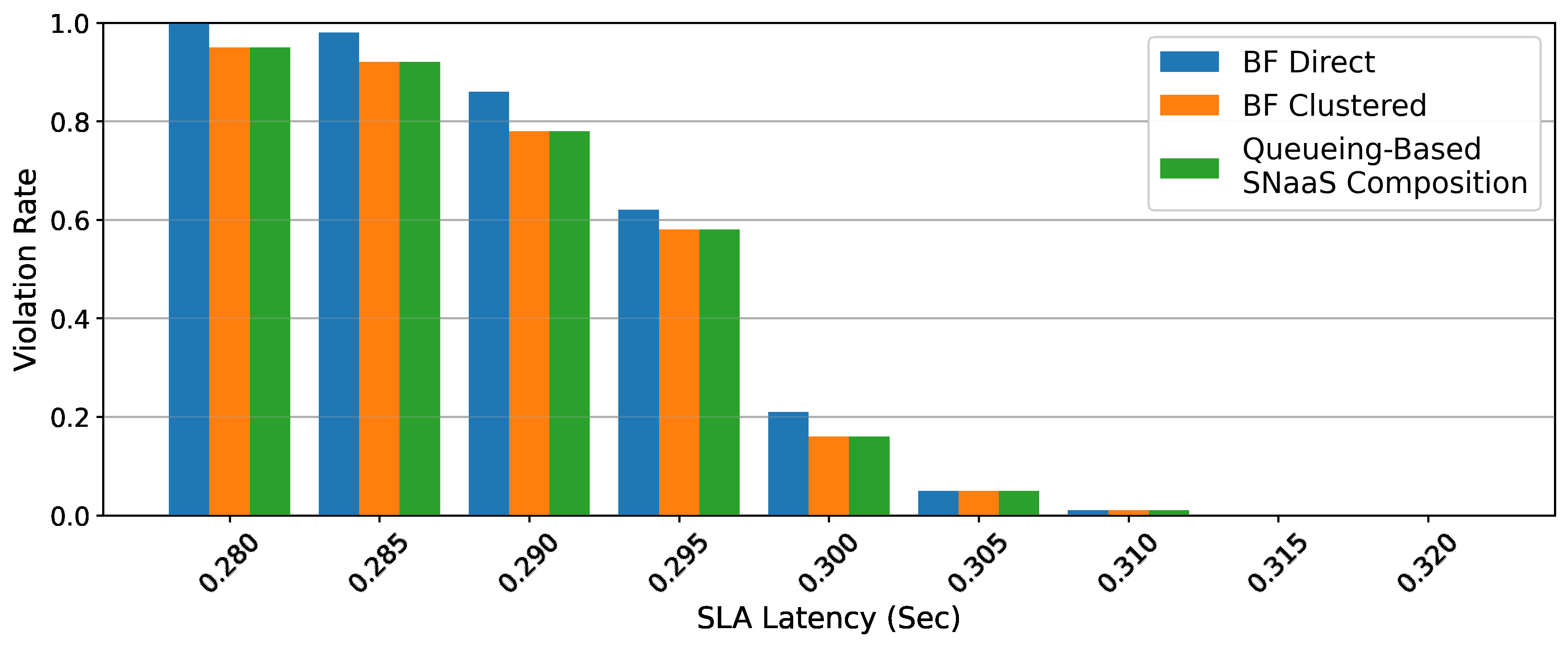
Fig 8: Violation rate versus requested SLA latency for a small-scale swarm.
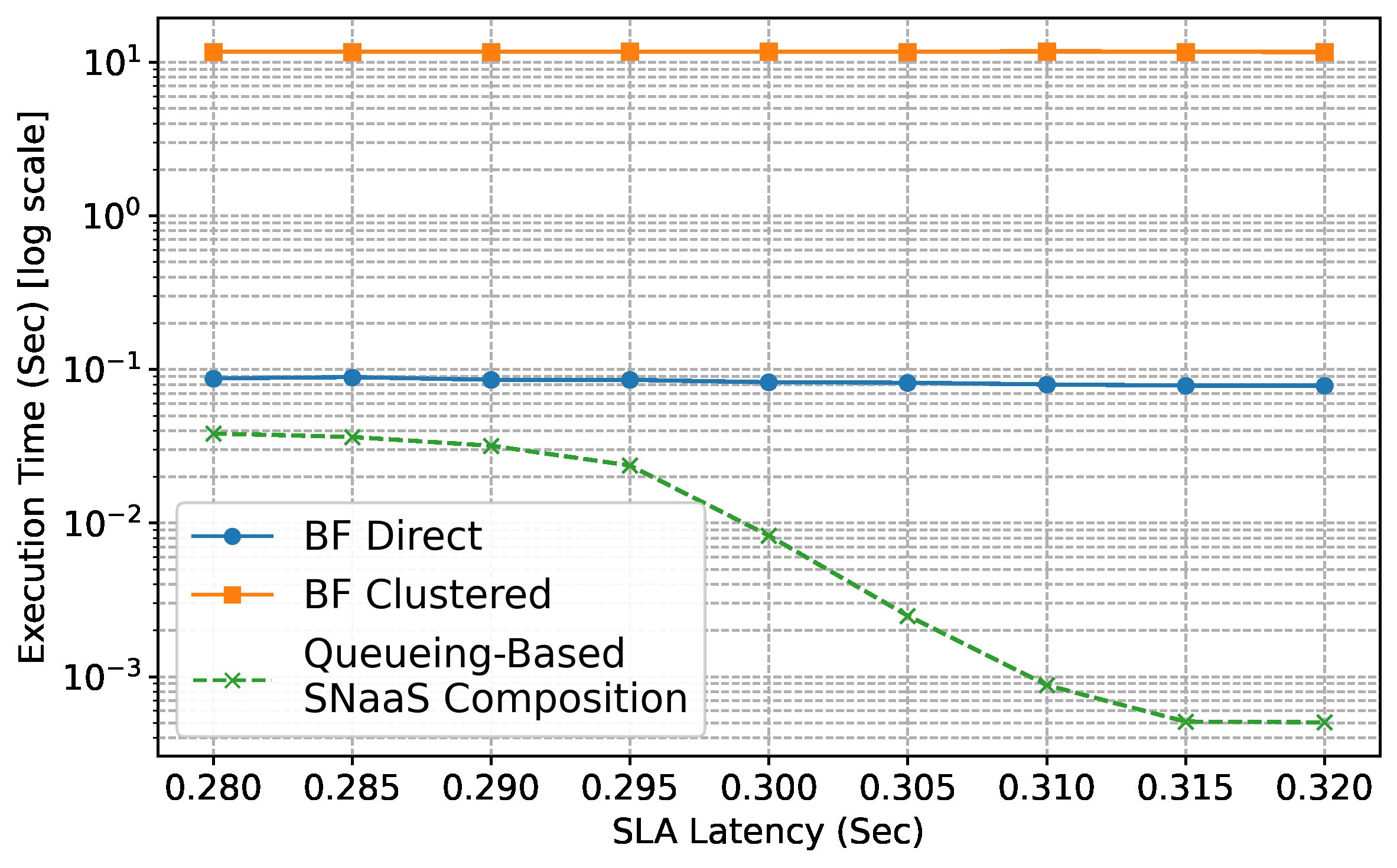
Fig 9: Average execution time per request versus SLA latency (log scale).
Limitations
- Energy consumption and battery depletion management of drones is out of scope, limiting realism in long-term deployments.
- Real-world deployment constraints such as drone mobility, interference, or environmental obstructions are not explicitly modeled.
- Adversarial threats including malicious drones or jamming are not considered in the threat model.
- The empirical validation uses measurement data but the full system evaluation is simulation-based; generalization to diverse environments is untested.
- Code and datasets are not publicly released, hindering reproducibility.
- Queueing model assumes non-preemptive priority M/G/1 queues and homogeneous drone capabilities, which may oversimplify real traffic and hardware heterogeneity.
Open questions / follow-ons
- How would dynamic drone mobility and repositioning impact SNaaS composition and SLA enforcement?
- Can energy-aware or battery-constrained drone replacement policies be integrated into the composition framework without violating SLAs?
- How robust is the queueing model and composition heuristic under bursty or highly variable traffic patterns?
- What countermeasures or architectural extensions are necessary to handle adversarial threats such as rogue drones or signal jamming in SNaaS?
Why it matters for bot defense
For bot-defense and CAPTCHA practitioners, this work presents a fresh angle on managing highly dynamic, infrastructure-less network connectivity via drone swarms exposed as SLA-driven services. It illustrates how complex multi-hop aerial networks can be abstracted, composed, and managed to deliver reliable and low-latency connectivity, which could inform designs for adaptive distributed verification systems relying on ephemeral mobile infrastructure. The queueing-theoretic modeling and automated composition strategies address how to enforce QoS guarantees under variable load—conceptually analogous to balancing bot traffic and legitimate user interactions to uphold security policies without degrading user experience.
While the paper does not directly address bot detection or CAPTCHAs, the SNaaS architectural principles and SLA enforcement modules demonstrate how network services can be flexibly orchestrated and reconfigured in real-time, a capability that could be extended to distributed verification infrastructures or secure proxy networks that support bot-defense. However, adapting the framework for adversarial network behavior or attack resilience would require a separate threat model and additional mechanisms.
Cite
@article{arxiv2605_13341,
title={ Swarm Network-as-a-Service (SNaaS) },
author={ Balsam Alkouz and Osama Amin and Basem Shihada },
journal={arXiv preprint arXiv:2605.13341},
year={ 2026 },
url={https://arxiv.org/abs/2605.13341}
}