
Chrono::Ray: A Distributed Framework for High-Throughput Simulation-Based Analysis of Multibody Systems
Source: arXiv:2605.13767 · Published 2026-05-13 · By Khailanii Slaton, Dan Negrut
TL;DR
Chrono::Ray is a distributed framework designed to enable high-throughput simulation-based analyses of complex multibody systems by integrating the Project Chrono physics engine with the Ray distributed computing platform. The framework provides user-friendly abstractions that allow engineers to define simulations and parameter spaces without needing expertise in distributed computing. Chrono::Ray supports workflows such as parameter estimation, Bayesian optimization, general optimization, and design of experiments, enabling scalable orchestration of large simulation ensembles.
The paper demonstrates Chrono::Ray’s capabilities through two representative engineering studies: recovering parameters for a multibody lunar lander impact model via a parameter estimation workflow, and running a design of experiments on a continuum terramechanics model using a Latin hypercube sampling design. Results show Chrono::Ray can efficiently manage distributed trials, returning high-quality parameter estimates and enabling complex exploratory analyses, while abstracting the underlying cluster management from the user. This reduces overhead for computationally intensive simulation studies that require many runs to analyze uncertainty or optimize systems.
Key findings
- Chrono::Ray executes distributed parameter estimation, successfully recovering multibody lunar lander parameters (β, α2, fy) with a best RMSE ≈ 3.53 after 8 trials out of 50 total, demonstrating efficient convergence in a 28.66 second wall-clock time.
- The framework supports large ensembles of simulation runs, e.g., 20-member design of experiments on a six-parameter continuum terramechanics model using Latin hypercube sampling, with constraint enforcement (κ < λ) integrated naturally.
- Users define a simulation function and parameter sampling space, and Chrono::Ray automatically handles distributed execution, resource scheduling, and result aggregation without requiring explicit parallel programming.
- Ray Tune’s search algorithms (random, grid, Bayesian, CMA-ES, etc.) and schedulers (ASHA, Hyperband) integrate seamlessly, enabling range of parameter search and early termination strategies.
- The framework’s workflow classes (ChRParamEst, ChRBayesOpt, ChROpt, ChRDoE) share a consistent user API, enabling easy switching between parameter estimation, optimization, and ensemble studies using the same model.
- Logging and output redirection features support traceability and post hoc analysis of ensemble simulation outputs.
- Chrono::Ray interfaces with PyChrono (Project Chrono’s Python binding), preserving access to high-fidelity multibody dynamics while enabling scalable high-throughput execution on heterogeneous clusters.
- Two case studies highlight complementary use cases: objective-driven parameter recovery and open-ended exploratory design of experiments.
Threat model
n/a — This work does not focus on security or adversarial scenarios. Rather, it assumes a trustworthy user seeking to leverage distributed cloud or cluster computing to run large ensembles of computational engineering simulations without managing infrastructure details.
Methodology — deep read
Threat model & Assumptions: Chrono::Ray targets engineering users needing to run many computationally expensive multibody simulations but lacking expertise or resources to implement distributed computing workflows themselves. The adversary concept is n/a as the work focuses on enabling scalable, not adversarial, simulation workflows.
Data: Users supply problem-specific multibody simulation models via PyChrono Python bindings. Two demonstration cases: (1) lunar lander impact model with parameters β, α2, fy to recover from specified target outputs (peak acceleration, energy absorbed), and (2) continuum terramechanics model with six material/numerical parameters sampled over defined bounded ranges. Input data consists of simulation configurations and output measurements from each trial.
Architecture/Algorithm: The core of Chrono::Ray is an abstraction layer bridging the Chrono simulation engine with Ray’s task-based distributed computing framework. The user defines a Python callable simulate_fn(config) that runs one simulation trial, taking sampled parameters as input and returning outputs as a dictionary. Parameter spaces are specified as dictionaries of distributions (uniform, loguniform, choice). Chrono::Ray exposes four workflow classes: ChRParamEst (parameter estimation minimizing a loss relative to target outputs), ChRBayesOpt (Bayesian optimization with Gaussian processes), ChROpt (general optimization supporting any Ray Tune search algorithm), and ChRDoE (design of experiments generating structured parameter sets without an objective). Internally, Chrono::Ray uses Ray Tune to orchestrate trial scheduling, resource allocation, fault tolerance, and asynchronous execution.
Training Regime: Not applicable as this is simulation and optimization, not machine learning training.
Evaluation Protocol: Results were evaluated via root mean squared error of simulation outputs vs targets (parameter recovery) and visual/posthoc analysis of simulation output snapshots (DoE case). Performance is measured by minimized RMSE and wall-clock runtime. Baselines are implicit: sequential execution would be prohibitively slow. No cross-validation or statistical testing reported. The demonstrated workflows show typical behavior for stochastic search over parameter spaces.
Reproducibility: Source code is publicly available at https://github.com/uwsbel/chrono-ray.git. The paper provides example setups for the two demonstration cases. The underlying Project Chrono engine and Ray platform are open source. However, no frozen weights or datasets are applicable since this is simulation workflow software. Detailed user documentation and inline info functions enhance ease of reproduction.
Technical innovations
- Integration of high-fidelity PyChrono multibody simulation engine with Ray distributed computing platform to transparently enable scalable high-throughput simulation studies.
- Modular workflow abstractions (parameter estimation, Bayesian optimization, general optimization, design of experiments) that allow users to define simulation functions and parameter spaces without managing distributed execution details.
- Use of Ray Tune’s rich set of search algorithms and schedulers, adapted from ML hyperparameter tuning, to perform efficient parameter search and orchestration of large simulation ensembles.
- Consistent user-facing API and primitives (simulate_fn and param_sample_space) enabling reuse and easy switching between different large-scale simulation workflows.
- Support for real-time logging redirection, physical parameter constraints enforcement within simulation calls, and ability to handle diverse distributed computing environments (single workstation to cloud clusters).
Baselines vs proposed
- Sequential (implied): impractical due to computational cost and runtime; Chrono::Ray reduces wall-clock runtime to 28.66s for 50 lunar lander parameter estimation trials.
- Unoptimized sampling: Early best RMSE of 3.53 achieved by trial 8 out of 50 in lunar lander parameter recovery showing efficiency gains via Bayesian-style search within Chrono::Ray.
- Design of experiments: 20 Latin hypercube samples across 6 parameters on terramechanics model generate diverse simulation data efficiently without manual parallelization.
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.13767.
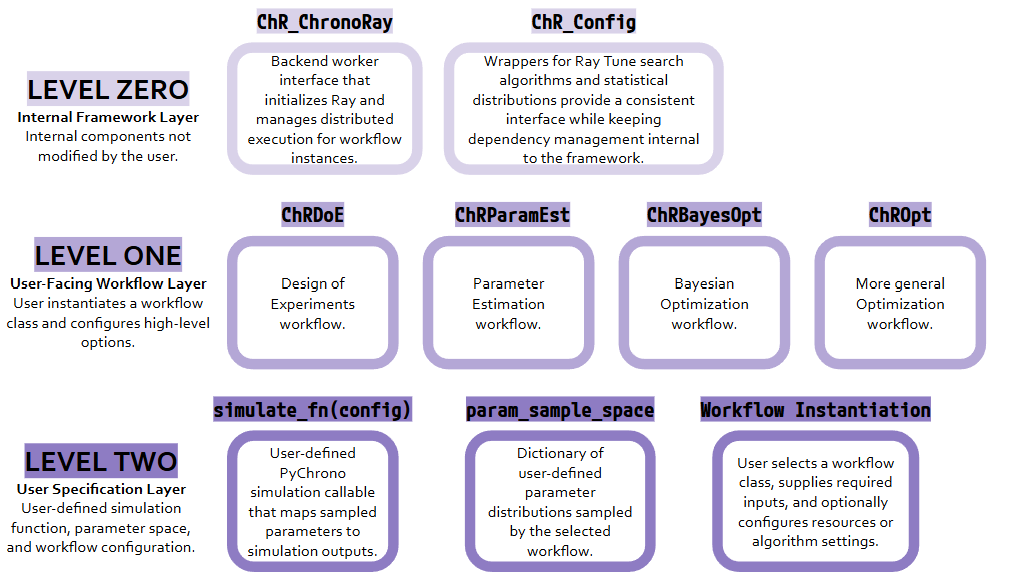
Fig 1: Chrono::Ray abstraction hierarchy showing user-defined inputs, workflow inter-
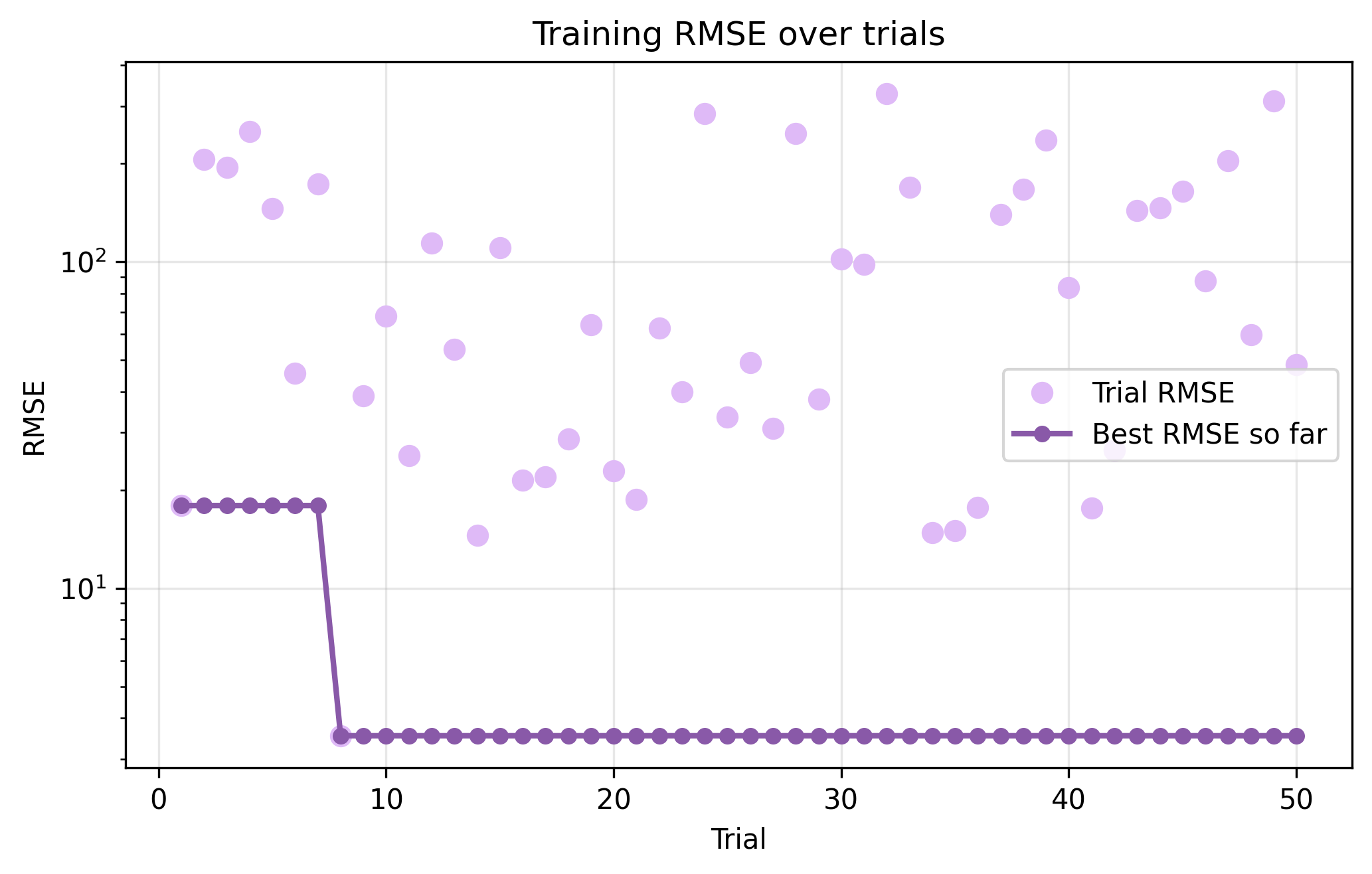
Fig 2: Parameter estimation results for the multibody lunar lander example. Individual
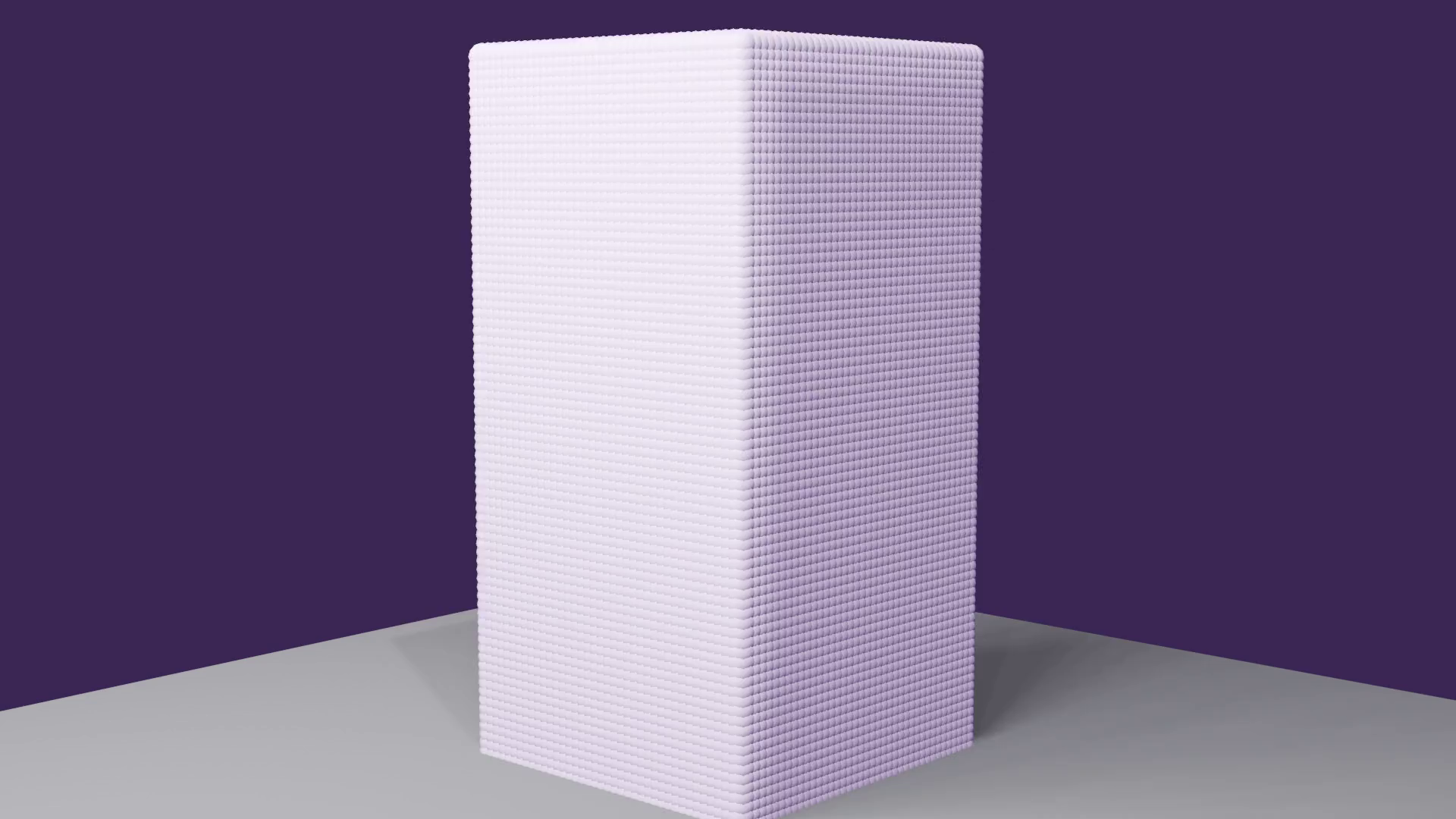
Fig 3: Representative snapshots from the continuum terramechanics design of experi-
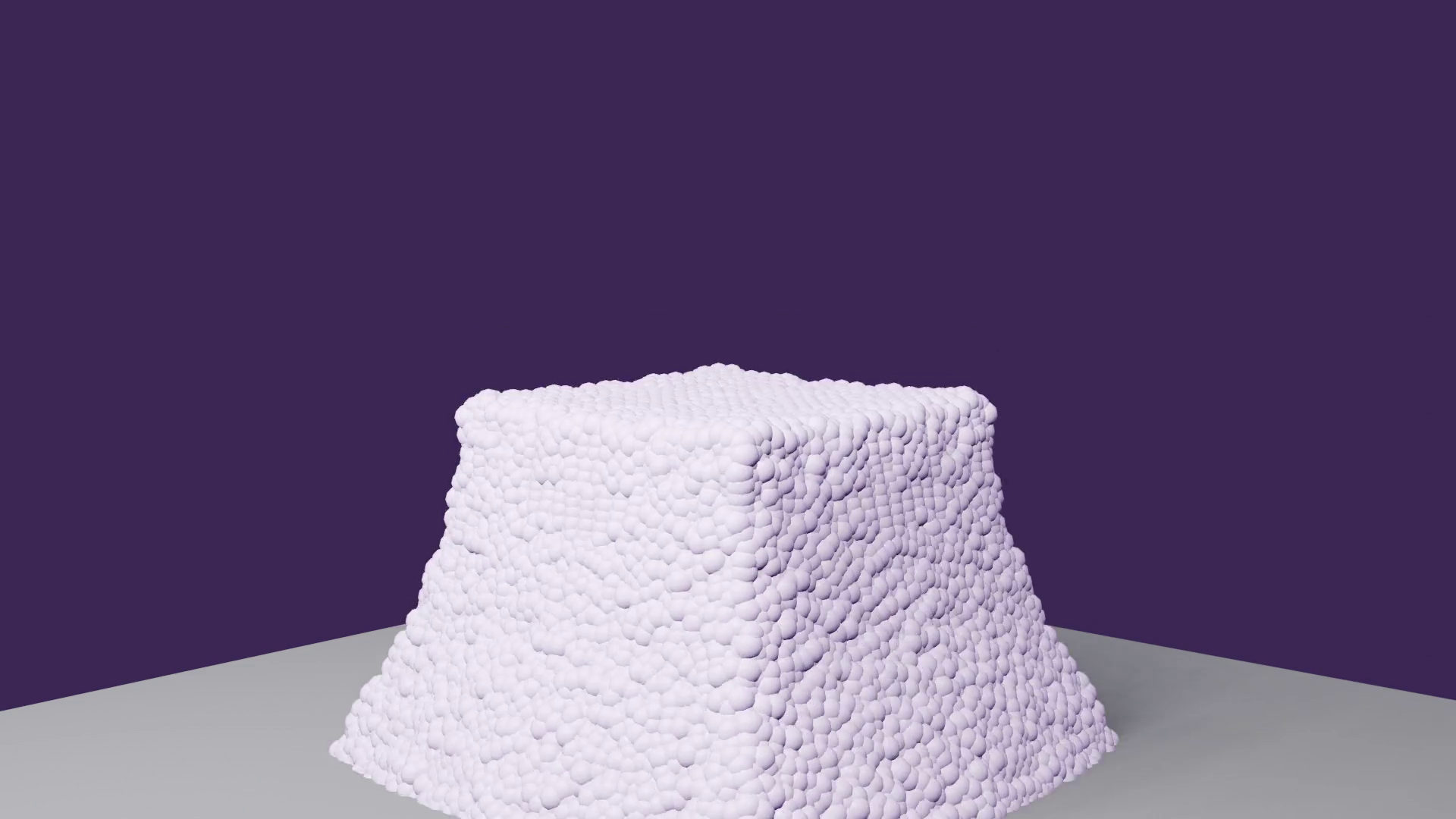
Fig 4 (page 10).
Fig 5 (page 10).
Limitations
- No direct comparison to alternative distributed simulation frameworks or parallel execution approaches to quantify speedup or scalability characteristics.
- No adversarial or robustness analysis of the distributed framework under node failure or network latency stresses beyond inherent Ray fault tolerance.
- Demonstrations limited to two domain examples; more diverse engineering cases would clarify broader applicability and performance.
- No formal convergence or regret analysis of the search or optimization algorithms when applied to simulation problems.
- Simulation wall-clock timing results given for total workflow only; per-trial or cluster resource utilization profiles are not reported.
- The parameter estimation example reports RMSE values but does not compare to ground truth parameter recovery accuracy or uncertainty quantification.
Open questions / follow-ons
- How does Chrono::Ray scale with increasing cluster size, worker heterogeneity, and larger parameter spaces in terms of throughput and latency?
- What is the impact of using different Ray Tune search algorithms and schedulers on optimization convergence speed and resource efficiency for different simulation workloads?
- Can Chrono::Ray support adaptive multi-fidelity or surrogate-based optimization workflows to further reduce computational cost?
- How can uncertainty quantification and global sensitivity analysis be integrated natively into the framework beyond proposed extensions?
Why it matters for bot defense
While Chrono::Ray is not directly related to CAPTCHA or bot-defense, it provides valuable insights into how complex simulation-based workflows can be abstracted and distributed at scale. Bot-defense and CAPTCHA systems that require large-scale evaluation of diverse behavioral models or robustness tests could adopt similar distributed orchestration concepts to efficiently run massive ensembles of tests or parameter sweeps with minimal distributed systems expertise. Moreover, leveraging a high-level workflow interface decoupled from infrastructure details can improve iteration speed and reproducibility in developing robust anti-bot models or CAPTCHAs. The paper reinforces the importance of modular, user-friendly pipelines for orchestrating many expensive function evaluations—a principle applicable for large-scale adversarial or behavioral analysis in bot detection.
Cite
@article{arxiv2605_13767,
title={ Chrono::Ray: A Distributed Framework for High-Throughput Simulation-Based Analysis of Multibody Systems },
author={ Khailanii Slaton and Dan Negrut },
journal={arXiv preprint arXiv:2605.13767},
year={ 2026 },
url={https://arxiv.org/abs/2605.13767}
}