
Adaptive Domain Decomposition Physics-Informed Neural Networks for Traffic State Estimation with Sparse Sensor Data
Source: arXiv:2605.08028 · Published 2026-05-08 · By Eunhan Ka, Ludovic Leclercq, Satish V. Ukkusuri
TL;DR
Traffic state estimation (TSE) from sparse fixed freeway sensors is fundamentally difficult for physics-informed neural networks (PINNs) because the Lighthill-Whitham-Richards (LWR) model—a first-order hyperbolic conservation law—admits shockwave solutions (sharp density discontinuities at congestion fronts), while vanilla PINNs are structurally biased toward smooth, low-frequency functions. Existing domain decomposition PINNs (e.g., XPINNs) require user-specified subdomain boundaries, and no prior work had systematically addressed how to adaptively discover those boundaries from residual evidence in the context of sparse fixed-sensor freeway reconstruction, nor had the choice of decomposition direction (spatial vs. temporal vs. space-time) been studied under fixed-sensor observability constraints.
The paper proposes ADD-PINN (Adaptive Domain Decomposition PINN), a two-stage framework: Stage 1 trains a coarse global PINN; a transition step then computes the spatial residual profile and applies a data-driven shock indicator to decide whether decomposition is warranted; Stage 2 launches child subnetworks (initialized from parent weights via warm start) in the identified subdomain layout with conservation-aware interface coupling. If the shock indicator finds insufficient evidence of localized transitions, the system falls back to the single-domain output of Stage 1, preventing unnecessary decomposition on smooth-enough problems.
The primary evaluation uses the real-world I-24 MOTION dataset across five days, five sensor density configurations, and ten random seeds per configuration (1,500 total runs), benchmarked against five neural and physics-informed baselines. ADD-PINN achieves the lowest relative L2 error in 18 of 25 day-configuration pairs overall and 14 of 15 sparse-sensing configurations, while training 2.4× faster than the XPINN baseline. A supplementary negative-control experiment on NGSIM—where traffic is smoother—shows the shock indicator correctly suppressing decomposition in all 50 runs, with the single-domain fallback ranking first, validating that the adaptive mechanism does not over-decompose on problems that do not warrant it.
Key findings
- ADD-PINN attains the lowest relative L2 error in 18 of 25 day-sensor configurations and in 14 of 15 sparse-sensing (≤5 sensor) cases on the I-24 MOTION dataset across 1,500 total runs (5 days × 5 sensor configs × 10 seeds).
- ADD-PINN trains 2.4× faster than the XPINN baseline (B5) in the evaluated I-24 MOTION configurations, attributed to parent-to-child warm-start weight transfer reducing Stage 2 fine-tuning cost.
- The data-driven shock indicator suppresses decomposition in all 50 NGSIM runs (5 sensor configs × 10 seeds), and the resulting single-domain fallback ranks first across all NGSIM sensor configurations, confirming that the adaptive mechanism avoids spurious decomposition on smoother traffic fields.
- A 120-run ablation comparing spatial-only, temporal-only, and space-time decomposition supports spatial-only decomposition as the most effective default direction for fixed-sensor freeway TSE, motivated by shockwave geometry (predominantly spatial), data-coverage asymmetry (sensors provide full temporal traces at fixed locations), and spatial anisotropy of the LWR residual profile.
- Fixed loss weights wdata=0.85, wpde=0.05, wint=0.10 are held constant across all datasets, baselines, and seeds, with the dominant data weight reflecting the data-assimilation character of the problem and consistent with Lei et al. (2025) findings that excessive physics weighting degrades PINN performance for traffic flow.
- The spatial residual profile R(x), computed as the mean squared PDE residual aggregated over the time axis from the Stage 1 coarse PINN, is used to place the subdomain split at the spatial location of maximum residual, providing an automatic and problem-driven boundary without user specification.
- The Fourier feature embedding (random matrix W ~ N(0,σ²) with σ=10, fixed after initialization, de=128 for a 256-neuron first hidden layer) is used in all networks including baselines, so spectral bias mitigation via Fourier features is not an exclusive ADD-PINN advantage in the comparison.
Threat model
n/a — this paper addresses the estimation-theoretic challenge of reconstructing freeway traffic state from sparse sensor data under structural incompatibility between hyperbolic PDE shockwaves and smooth neural network approximations. No adversarial agent, data poisoning, sensor spoofing, or evasion attack is modeled. The 'adversary' is implicitly the physical difficulty of shockwave discontinuities and sparse observability rather than a strategic attacker.
Methodology — deep read
Threat model and problem scope: This is not a security paper in the adversarial ML sense. The 'adversary' is the fundamental difficulty of sparse observability: sensors are fixed at a small number of spatial locations (as few as 1–3 sensors along a multi-mile freeway corridor), and the LWR PDE admits shockwave solutions that are structurally incompatible with pointwise strong-form residual minimization. The framework is offline (post-hoc reconstruction of speed fields from fixed historical sensor windows), not real-time. No adversarial data poisoning or sensor spoofing is considered. The free-flow speed vf is pre-estimated from observed data and held fixed; jam density ρjam is set to 1 in normalized coordinates via the Greenshields fundamental diagram. The evaluation is intentionally scoped to the PINN family; matched comparison with extended Kalman filtering, adaptive smoothing, or variational Hamilton-Jacobi methods is identified as future work.
Data provenance, size, and preprocessing: The primary dataset is I-24 MOTION, a high-resolution radar-based freeway monitoring system on Interstate 24 near Nashville, Tennessee, providing lane-level speed measurements at high spatial density. Five specific days are used (including 2022-11-21 as the representative case shown in Fig. 1 and Fig. 3). The evaluation considers five sensor configurations (varying number of fixed detectors: the paper describes sparse sensing with as few as 1–3 sensors up to denser configurations, with 15 sparse-sensing cases defined as those with the fewest sensors). Ten random seeds per configuration are run to assess seed sensitivity, yielding 1,500 total runs. The supplementary dataset is NGSIM (Next Generation Simulation), a trajectory-based dataset from US Highway 101 and I-80 that yields smoother traffic states without strong shockwaves; 50 runs are conducted on NGSIM (5 sensor configs × 10 seeds). All inputs are min-max normalized to [0,1]: spatial coordinate x̂, temporal coordinate t̂, and speed û, with normalization parameters derived from observed min/max speeds and domain extents. The PDE residual is also normalized by a denominator √(A²+B²+1) derived from the physical-unit-to-normalized-unit conversion coefficients to keep residual magnitude O(1) regardless of domain aspect ratio.
Architecture and novel components: Each subnetwork is a fully connected feedforward network with tanh activations. The parent (Stage 1) network uses architecture [2→Fourier(256)→256→128→128→128→1]; child (Stage 2) subnetworks use [2→Fourier(256)→256→128→128→1], one hidden layer shallower than the parent. The Fourier feature layer projects the 2D input (x,t) through a fixed random matrix W~N(0,100) into 256-dimensional sinusoidal features [sin(Wv), cos(Wv)]. The key novel components are: (1) the spatial residual profile R(x) computed from the trained Stage 1 PINN by averaging the squared PDE residual r(x,t)² over time at each spatial collocation location, producing a 1D function whose argmax locates the split position; (2) the shock indicator, a data-driven criterion applied to observed sensor data that checks for localized evidence of speed transitions; if the indicator is weak, decomposition is suppressed and Stage 1 output is the final model; (3) parent-to-child warm start, which copies Stage 1 weights to initialize each child network before Stage 2 fine-tuning; and (4) conservation-aware interface conditions at the fixed artificial interface between subdomains, encoding Rankine-Hugoniot jump conditions and entropy constraints in normalized coordinates as regularization losses. The paper is explicit that these interface losses are conservation-aware regularizers in normalized coordinates rather than exact mass-conservation statements in physical units.
Training regime: Stage 1 runs for Esplit epochs (exact value not fully specified in the truncated text but referenced as a shared hyperparameter in Table 3). Stage 2 fine-tunes child networks initialized from parent weights. Total epochs, batch size for collocation sampling, optimizer (Adam is standard for PINNs but not explicitly confirmed in the truncated text), and initial collocation budget are described as shared across ADD-PINN and all baselines and reported in Table 3 (not available in the truncated text). Causal weighting is applied to PDE loss terms: the temporal domain is binned and PDE residual weights wcausal are set constant within each bin, respecting the causal structure of time-dependent PDEs following Wang et al. (2024). Residual-based adaptive refinement (RAR) is also incorporated, dynamically adding collocation points in high-residual regions (Wu et al., 2023). All runs use ten random seeds per configuration; seed strategy details beyond this count are not specified in the available text.
Evaluation protocol: The primary metric is relative L2 error on the reconstructed speed field, computed against the I-24 MOTION ground truth. Five baselines are compared: the paper references B2 (Vanilla PINN) and B5 (XPINN) by designation, with up to five total baselines (neural and physics-informed). An ablation study (120 runs) examines decomposition direction (spatial, temporal, space-time). Results are reported as win counts across configurations (e.g., 18/25, 14/15) and as mean relative L2 error vs. sensor count curves (Fig. 6). The NGSIM experiment is framed explicitly as a negative control: it tests whether the shock indicator correctly suppresses decomposition on smoother traffic. No formal statistical significance testing (e.g., paired t-tests or bootstrap confidence intervals) is explicitly described in the available truncated text, though the use of 10 seeds per configuration provides some basis for assessing variance. No held-out adversarial sensor configurations or distribution shift tests beyond the I-24/NGSIM contrast are described.
Concrete end-to-end example: For the representative case 2022-11-21 with 3 sensors (Fig. 3), the Stage 1 coarse PINN is trained on the full I-24 domain producing a spatially smooth speed field that over-smooths the congestion shockwave visible in Fig. 1. The spatial residual profile R(x) is computed and exhibits a peak at the spatial location of the shock front (Fig. 5). The shock indicator, applied to the three sensor time series, finds evidence of a speed transition and enables decomposition. A single spatial split is placed at the argmax of R(x). Two child networks are initialized from the parent weights and fine-tuned in Stage 2 with interface losses enforcing conservation-aware continuity. The resulting reconstruction (Fig. 3) shows sharper resolution of the congestion boundary. Pointwise error maps (Fig. 4) show that the highest errors in vanilla PINN and XPINN are concentrated at the shock front, while ADD-PINN reduces these localized errors.
Reproducibility: The paper reports running 1,500 total runs with fixed shared hyperparameters across baselines and seeds. Code release status and dataset access terms for I-24 MOTION are not confirmed in the available text. The Fourier feature matrix W is drawn randomly at initialization and held fixed, but it is unclear whether seeds for W initialization are controlled separately from the training seeds.
Technical innovations
- Residual-guided automatic subdomain boundary placement: the spatial residual profile R(x) from a Stage 1 coarse PINN is used to locate split positions at the argmax of time-aggregated PDE residual, eliminating user-specified decomposition in contrast to XPINN (Jagtap and Karniadakis, 2020) and cPINN (Jagtap et al., 2020).
- Data-driven shock indicator acting as a decomposition gate: rather than always decomposing, ADD-PINN checks for localized transition evidence in observed sensor data and suppresses Stage 2 decomposition when evidence is weak, falling back to the Stage 1 single-domain output—a mechanism absent from prior DD-PINNs.
- Parent-to-child warm-start weight transfer: Stage 1 parent weights are copied to initialize all child subnetworks before Stage 2 fine-tuning, enabling faster convergence and yielding 2.4× training speedup over XPINN, which does not use coarse-to-fine warm start in the standard formulation.
- Decomposition-direction analysis for fixed-sensor TSE: a controlled 120-run ablation over spatial, temporal, and space-time decompositions, motivated by LWR shockwave geometry and fixed-sensor data-coverage asymmetry, provides empirical and theoretical rationale for spatial-only decomposition as the effective default—a question not previously studied in the PINN-for-traffic literature.
- Conservation-aware interface coupling in normalized coordinates: Rankine-Hugoniot and entropy-based regularization losses are applied at fixed artificial subdomain interfaces in normalized speed-density coordinates, adapting the LWR conservation law structure to the ADD-PINN interface design rather than using generic residual-continuity conditions as in XPINN.
Datasets
- I-24 MOTION — 5 days × 5 sensor configurations × 10 seeds = 1,500 runs; radar-based freeway speed measurements on Interstate 24, Nashville, TN — non-public / restricted access research dataset
- NGSIM (Next Generation Simulation) — 5 sensor configurations × 10 seeds = 50 runs; vehicle trajectory data from US-101 and I-80 used as negative control — publicly available via FHWA
Baselines vs proposed
- Vanilla PINN (B2): relative L2 error — specific numerical values not available in truncated text; ADD-PINN wins in 18/25 overall and 14/15 sparse-sensing configurations on I-24 MOTION
- XPINN (B5): training time — 2.4× slower than ADD-PINN on I-24 MOTION; relative L2 error — ADD-PINN lower in the majority of evaluated configurations per Fig. 6
- NGSIM negative control — shock indicator fallback (single-domain): ranks first across all 5 NGSIM sensor configurations; ADD-PINN decomposition suppressed in 50/50 runs
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.08028.
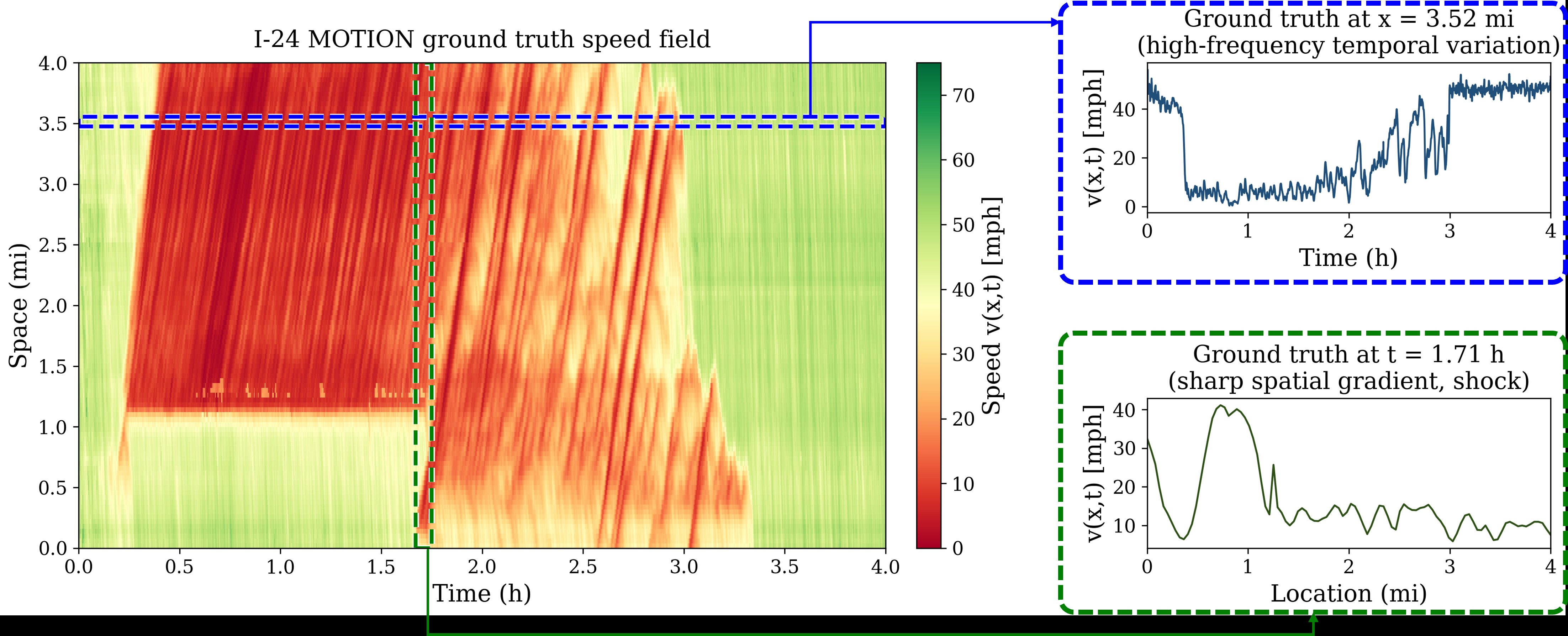
Fig 1: Ground-truth speed field u(x, t) from I-24 MOTION on 2022-11-21 (left), with
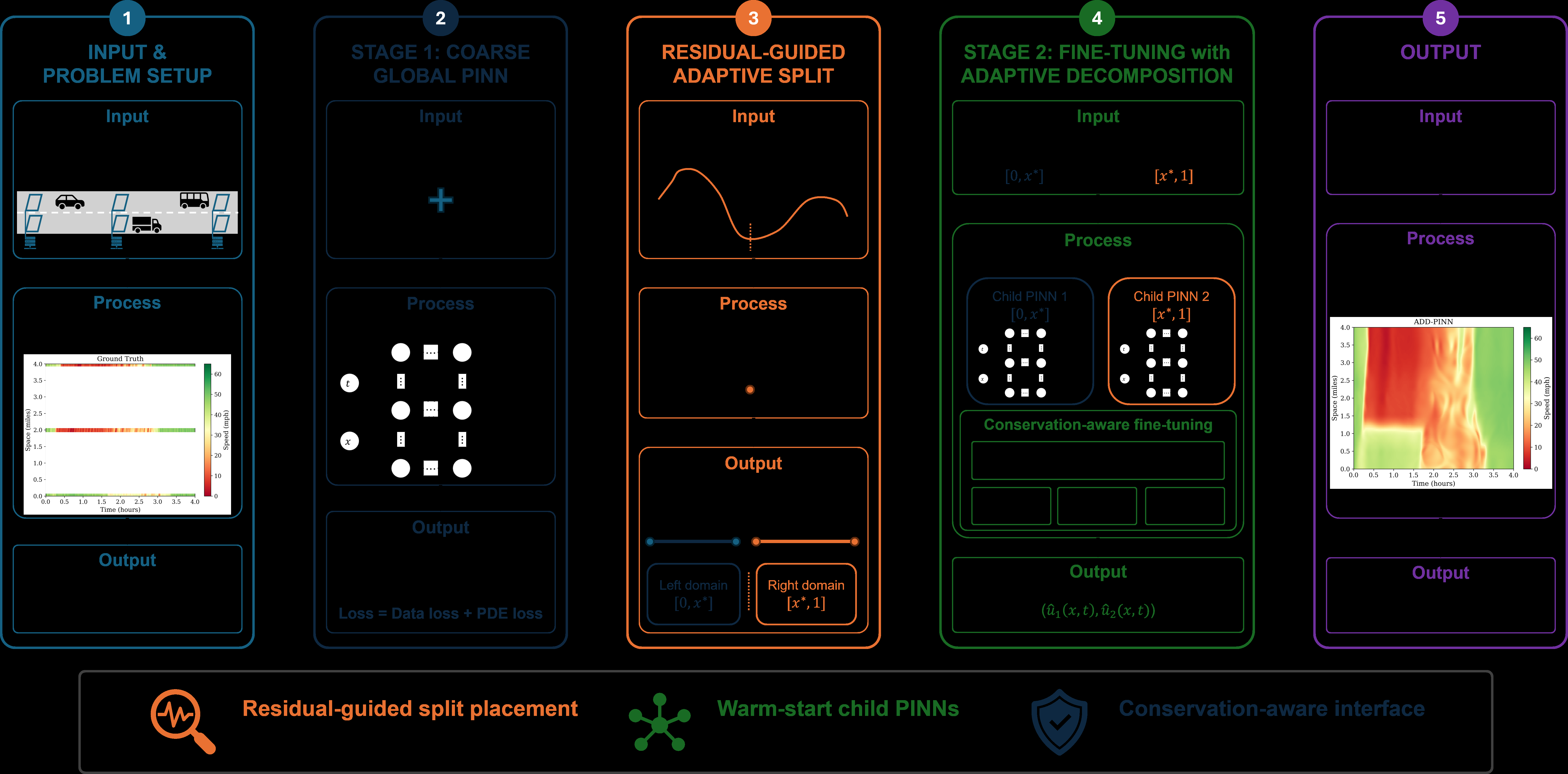
Fig 2: Framework overview of ADD-PINN.
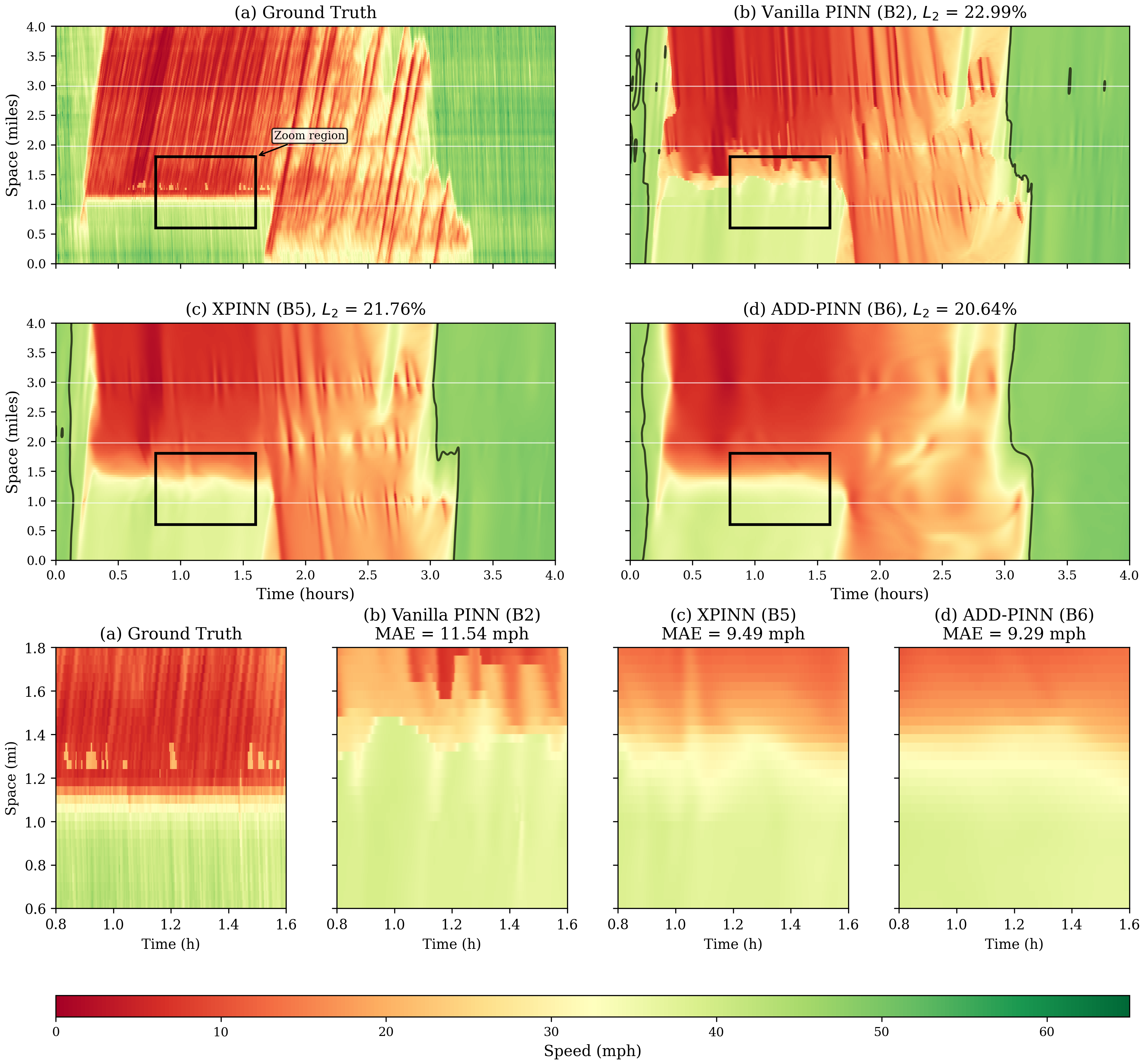
Fig 3: Representative speed field reconstruction for 20221121 with 3 sensors. Panel
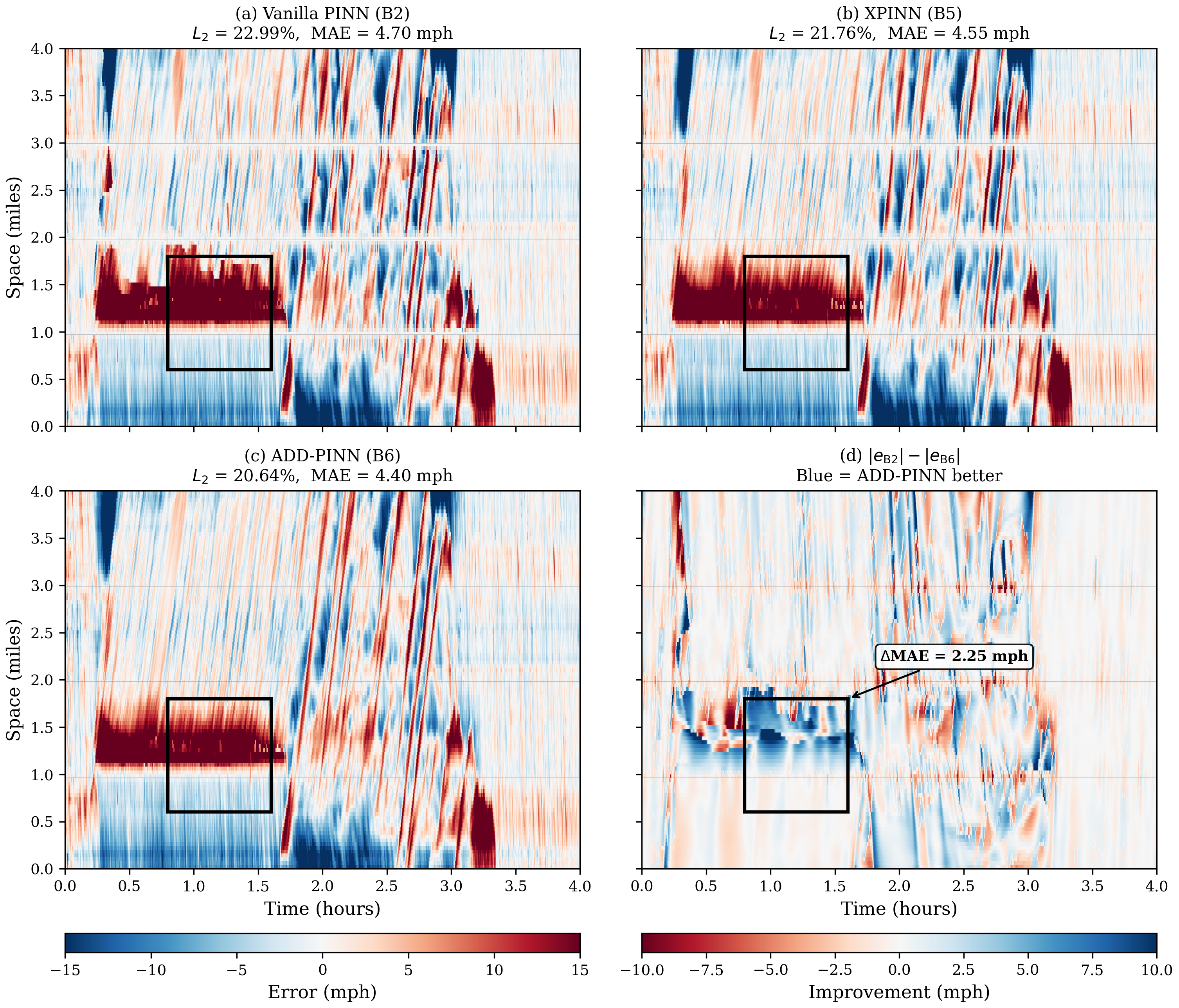
Fig 4: Pointwise error maps for the representative case in Figure 3. Panels (a), (b),
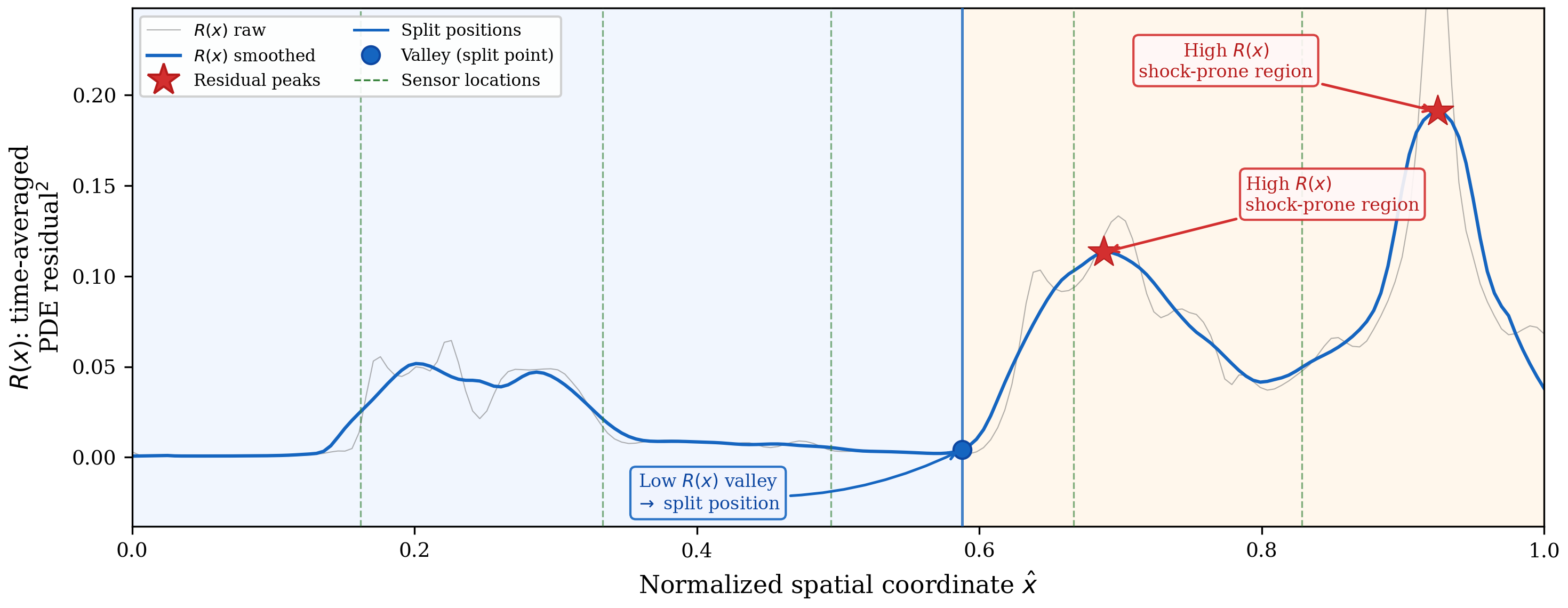
Fig 5: Spatial residual profile R(x) for 20221121 with 5 sensors, computed from the
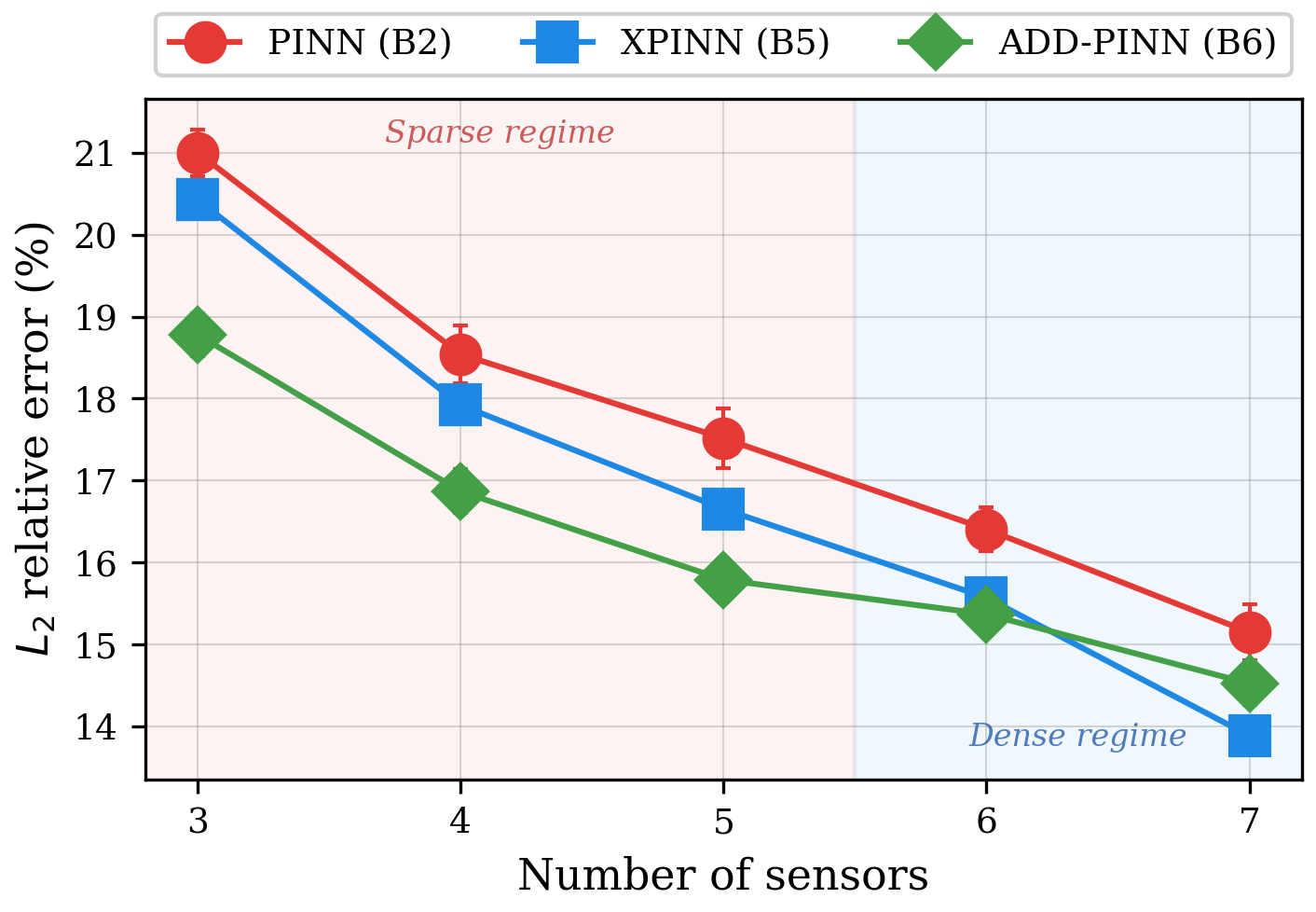
Fig 6: Mean relative L2 error versus sensor count for Vanilla PINN (B2), XPINN (B5),
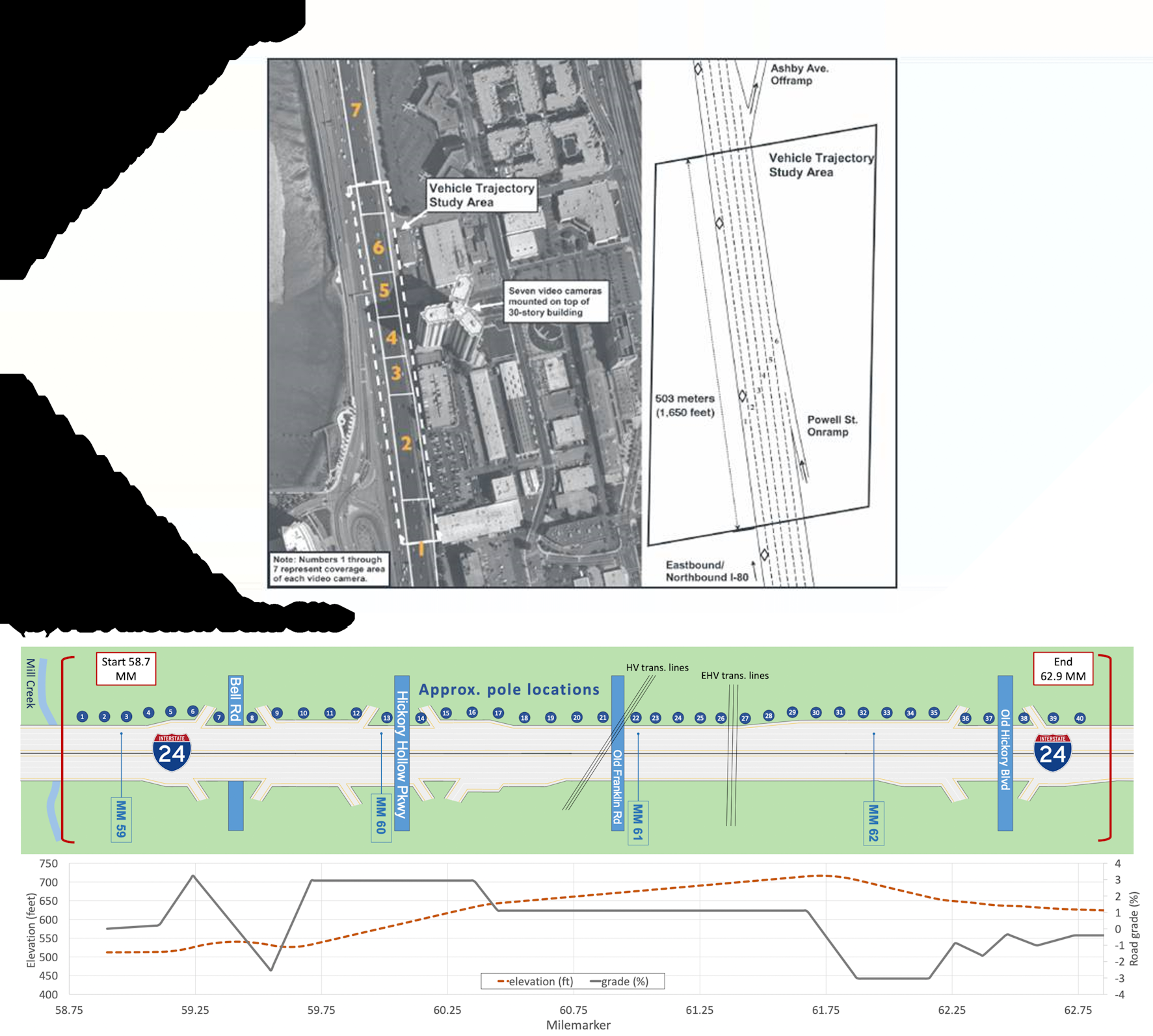
Fig 7 (page 53).
Limitations
- Exact numerical L2 error values for individual baselines are not fully reported in the truncated text (Table 3 and detailed per-day per-configuration tables are referenced but not available), limiting independent verification of magnitude of improvement beyond win-count statistics.
- The framework is evaluated only on one spatial decomposition (a single split into two subdomains); the behavior with multiple splits or hierarchical decomposition is not studied, which may limit applicability to longer corridors with multiple shock fronts.
- The Greenshields fundamental diagram is used as the sole LWR closure; the paper acknowledges this is one admissible choice and that triangular or calibrated diagrams would require modifying the residual and interface flux expressions, but no sensitivity analysis to the closure choice is provided.
- No matched comparison with classical TSE methods (extended Kalman filter, adaptive smoothing, variational Hamilton-Jacobi) is performed; the authors acknowledge this gap but scope it to future work, leaving the practical accuracy gap vs. operational methods unknown.
- The shock indicator's decision threshold and its sensitivity to threshold choice are not fully characterized in the available text; it is unclear how the indicator would behave on edge cases with partial or ambiguous congestion transitions.
- The evaluation is offline (batch reconstruction over a fixed historical window) and does not address online or streaming TSE; computational latency of Stage 1 training before the split decision could be prohibitive for real-time applications.
- Statistical significance of win-count results (18/25, 14/15) is not formally tested with paired hypothesis tests or bootstrap confidence intervals, making it difficult to assess whether differences are statistically robust across the full 1,500 runs.
Open questions / follow-ons
- How does ADD-PINN scale to corridors with multiple concurrent shockwaves requiring more than one spatial split, and what is the optimal strategy for hierarchical or iterative residual-guided multi-split discovery?
- Can the shock indicator and residual-guided split placement be extended to online/streaming TSE where Stage 1 training must complete within a latency budget, and does warm-start transfer remain beneficial under non-stationary traffic regimes?
- How sensitive is ADD-PINN performance to the choice of fundamental diagram closure (Greenshields vs. triangular vs. calibrated), and can the residual-guided framework be adapted to piecewise or discontinuous fundamental relations without losing the smooth residual properties used for split detection?
- Does the spatial-only decomposition advantage over temporal and space-time decomposition hold on networks with on-ramps, off-ramps, or junctions where source terms break the spatial symmetry of the LWR residual, and how should interface conditions be modified for network-scale topology-driven decomposition?
Why it matters for bot defense
This paper is not directly relevant to CAPTCHA or bot-defense engineering. ADD-PINN is a domain-specific method for offline traffic state reconstruction from freeway sensors, with its core contributions (residual-guided subdomain splitting, conservation-law interface coupling, LWR PDE residual formulation) tightly coupled to the traffic estimation problem. No techniques transfer directly to bot detection, behavioral biometrics, or challenge-response authentication.
At a methodological level, a bot-defense engineer might note the general pattern of two-stage coarse-to-fine learning with a gating mechanism that suppresses complexity when evidence for it is weak—a design principle applicable to any system that must decide whether to invoke an expensive secondary model (analogous to risk-scoring pipelines that escalate to harder challenges only when a lightweight first-pass classifier flags ambiguity). The Fourier feature embedding as a remedy for spectral bias in low-dimensional input spaces is also a broadly useful technique for any PINN-adjacent or signal-reconstruction problem. However, these are generic ML design patterns rather than directly actionable bot-defense contributions.
Cite
@article{arxiv2605_08028,
title={ Adaptive Domain Decomposition Physics-Informed Neural Networks for Traffic State Estimation with Sparse Sensor Data },
author={ Eunhan Ka and Ludovic Leclercq and Satish V. Ukkusuri },
journal={arXiv preprint arXiv:2605.08028},
year={ 2026 },
url={https://arxiv.org/abs/2605.08028}
}