
Reconstruction or Semantics? What Makes a Latent Space Useful for Robotic World Models
Source: arXiv:2605.06388 · Published 2026-05-07 · By Nilaksh, Saurav Jha, Artem Zholus, Sarath Chandar
TL;DR
This paper addresses a foundational design question for latent diffusion model (LDM)-based robotic world models: should the latent space be optimized for pixel reconstruction (as in VAEs) or for semantic alignment (as in self-supervised vision foundation models)? The status quo in video diffusion borrows autoencoding latent spaces from image generation pipelines, but robotic world models need to support not just visual plausibility but also action-faithful dynamics, planning, and policy evaluation. The authors argue that optimizing for pixel fidelity conflates decoder quality with transition model quality, obscuring what the latent space actually encodes about robot-environment interaction.
Key findings
- V-JEPA 2.1 achieves the highest consensus VLA success rate at DiT-S (0.344 ± 0.038) versus VAE (0.169 ± 0.030) and VA-VAE (0.175 ± 0.030), roughly doubling policy-in-the-loop success under identical training conditions on BridgeV2.
- Semantic encoders achieve substantially higher IDM Pearson r for action recoverability: V-JEPA 2.1 scores 0.829/0.781 (k=1/k=4 on encoder latents) versus VAE's 0.507/0.476, a gap that largely persists after world model generation (V-JEPA 2.1 WM: 0.865/0.840 vs VAE WM: 0.478/0.464).
- Success classifier accuracy on generated world model latents is highest for SigLIP 2 (WM acc: 0.823) versus VAE (WM acc: 0.716), showing semantic spaces better preserve task-progress signals through the generative process.
- Reconstruction encoders (VAE, Cosmos) achieve competitive or superior pixel-level scores at DiT-S on FID (VAE: 17.4, Cosmos: 16.9 vs V-JEPA 2.1: 6.8) — wait, V-JEPA 2.1 is actually better on FID at DiT-S (6.771) — demonstrating that semantic encoders match or exceed reconstruction encoders on many visual metrics too, contradicting the assumption that semantic latents sacrifice generation quality.
- At DiT-L scale, VAE closes the visual gap significantly (best FID: 5.351, best JEPA sim: 0.980) but still lags all semantic encoders on CEM action recovery error at k=1, confirming that the action-geometry deficit is a structural property of the latent space, not just model capacity.
- Adapter compression (d=96 via S-VAE) generally improves visual quality and diffusion ease (e.g., Web-DINO96 FVD: 5.510 vs Web-DINO native: 6.656 at DiT-S) but degrades CEM action error and OOD robustness relative to native semantic features, revealing a tradeoff between diffusion tractability and control-geometry fidelity.
- Multi-view finetuning (3-camera BridgeV2 subset) improves CEM action recovery but degrades video quality, likely due to fewer training episodes; semantic encoders are more robust to this degradation than reconstruction-aligned ones.
- High-dimensional semantic latents (D=1024–1152) do not substantially increase DiT compute because the DiT processes a fixed N=256 patch tokens per frame; width only affects input/output projections, not attention costs.
Methodology — deep read
The threat model here is not adversarial in the security sense but rather an experimental design problem: the confound to be controlled is everything except the encoder choice. The authors fix the dataset (BridgeV2), history length (H=2), action conditioning scheme, DiT transition architecture, optimizer, and training schedule. Only the encoder fϕ, optional adapter αψ, and decoder path are varied. This controlled protocol isolates the causal effect of latent space choice on world model behavior across three evaluation axes.
Data provenance and setup: All world models are trained on BridgeV2, a real-robot manipulation dataset of approximately 60K WidowX 250 demonstrations across 13 task families, with 7-DoF end-effector actions (position, rotation, gripper state) and language instructions. For success classification probing, the SOAR dataset (~30.5K episodes, 1:2 success/failure split, WidowX 250) is used. Language instructions are not fed to the DiT during transition model training. Frames are subsampled every second frame; the model conditions on H=2 history frames and predicts K=8 future frames. At inference, autoregressive rollouts use a 10-frame sliding context. No explicit train/test split details are given for the main BridgeV2 split, which is a mild reproducibility concern.
Encoder variants and adapter design: Three reconstruction-aligned encoders are tested — SD3 VAE (D=16), VA-VAE (D=32), and Cosmos continuous image encoder (D=16) — all used without adapters (αψ = identity). Three semantic encoders are tested — V-JEPA 2.1 ViT-L (D=1024), Web-DINO ViT-L (D=1024, adapted from DINOv2), and SigLIP 2 ViT-L (D=1152). For semantic encoders, both native high-dimensional latents and compressed latents via a pretrained S-VAE adapter (D→d=96, KL-regularized, paired with a lightweight pixel decoder) are evaluated, yielding nine total world model variants. All encoders are frozen throughout world model training.
Transition model and training: The transition model is a Diffusion Transformer (DiT) with factorized spatial-temporal attention: non-causal spatial blocks attend over the N=256 patches within each frame, and causal temporal blocks attend across frames. Flow matching is used as the diffusion objective. For high-dimensional semantic spaces without adapters, a wide DDT head is appended to address the channel-width bottleneck of standard DiT projections without increasing token count. A dimension-dependent noise-schedule shift (following SD3/RAE recipes) is applied to all non-VAE encoders. Three DiT scales are tested: DiT-S, DiT-B, and DiT-L (scaling the transition backbone only). The paper states compute parity is maintained across variants for fair comparison; detailed GFLOP breakdowns are in Appendix Table 4, though the exact per-variant counts are not reproduced in the main text.
Evaluation protocol — three axes: (1) Visual fidelity: FID, SSIM, LPIPS, FVD, temporal-LPIPS, point-track consistency (PCK coverage), and WorldArena-derived perceptual/geometric scores (image quality, aesthetic quality, JEPA similarity, subject consistency, depth absolute relative error, dynamic degree, flow score). (2) Latent representation quality: An inverse dynamics model (IDM) is trained on frozen encoder latents to predict action chunks, then applied to world-model-generated latents — the Pearson r between predicted and ground-truth actions measures how much action information survives generation. A trajectory success classifier is trained on SOAR latents and similarly evaluated on generated latents. (3) Planning and downstream policy performance: Cross-entropy method (CEM) planning error at k=1 and k=4 horizons measures action recovery from predicted latent transitions. OpenVLA-7B is rolled out inside each world model on 20 BridgeV2 test episodes (8 trials each); success is judged by consensus between InternVL 3.5-14B and Qwen3.6-27B VLM raters (Cohen's kappa is reported for inter-rater agreement, see Fig. 4 of paper). OOD evaluations cover distractor-object injection and OOD instruction perturbations on a 10-episode subset. Statistical significance of semantic vs. reconstruction family differences is tested via paired bootstrap over tasks (Appendix D.3).
Concrete end-to-end example: For the V-JEPA 2.1 world model at DiT-S, a BridgeV2 episode observation is encoded by the frozen ViT-L encoder to a 256×1024 spatial latent (16×16 patches × 1024 channels). The S-VAE adapter (when used) compresses this to 256×96. The DiT-S transition model, conditioned on H=2 history latents and the action sequence, denoises K=8 predicted future latents via flow matching. At inference, one frame is unrolled at a time using a 10-frame context window. The predicted latents are decoded to pixels via the adapter's lightweight pixel decoder. An IDM then takes consecutive latent pairs from the rollout and predicts actions; the Pearson r between these and ground-truth actions yields the action recoverability score (V-JEPA 2.1 WM: r=0.865 at k=1). Separately, OpenVLA-7B receives the decoded pixel rollout as its visual observation and executes actions, with VLM judges scoring task success.
Reproducibility: Model weights are released on HuggingFace (Nilaksh404/semantic-wm) and a project page exists. However, the BridgeV2 train/test split protocol, random seeds, and exact episode counts used for VLA evaluation (20 episodes, 8 trials each = 160 rollouts total, a relatively small sample) are not fully specified in the main text. The SOAR dataset is cited as a separate resource. Code release is not explicitly confirmed in the excerpted text beyond the HuggingFace weight release.
Technical innovations
- Controlled multi-encoder evaluation protocol that isolates the latent space as the sole independent variable across six encoders and three DiT scales, distinguishing encoder effects from transition model capacity effects — prior work (DINO-WM, V-JEPA 2-AC) used non-diffusion architectures and did not run this cross-encoder comparison.
- Three-axis evaluation framework (visual fidelity, latent representation quality, planning/policy performance) that disentangles pixel-decoder quality from transition-model quality, exposing the insufficiency of visual metrics alone for world model selection.
- Extension of the RAE wide-DDT-head and dimension-dependent noise-schedule-shift recipe to action-conditioned robotic world modeling in high-dimensional semantic spaces (D up to 1152), enabling stable diffusion training without adapter compression.
- Empirical characterization of the adapter compression tradeoff: S-VAE compression (D→96) aids diffusion denoising and visual quality but measurably degrades CEM action recovery and OOD robustness, suggesting a previously unquantified cost to compressing semantic features for robot control.
- IDM-based latent trajectory diagnostic (Fig. 2) that projects encoder outputs onto canonical-correlation directions with ground-truth actions, providing an interpretable pre-training signal for encoder selection before any world model training.
Datasets
- BridgeV2 — ~60K episodes, WidowX 250 robot, 13 task families, RGB + 7-DoF actions + language instructions — public (Stanford/Berkeley)
- SOAR — ~30.5K episodes, WidowX 250, success/failure labels + language instructions, 1:2 class split — cited as separate resource [81], provenance not fully described in excerpted text
Baselines vs proposed
- VAE (SD3) DiT-S: Consensus VLA SR = 0.169 vs V-JEPA 2.1: 0.344
- VA-VAE DiT-S: Consensus VLA SR = 0.175 vs SigLIP 2: 0.325
- Cosmos DiT-S: Consensus VLA SR = 0.244 vs Web-DINO96: 0.300
- VAE DiT-S: IDM Pearson r (WM, k=1) = 0.478 vs V-JEPA 2.1: 0.865
- VAE DiT-S: Success classifier WM acc = 0.716 vs SigLIP 2: 0.823
- VAE DiT-S: CEM error k=4 = 0.612 vs V-JEPA 2.1: 0.424
- VAE DiT-S: FVD = 6.829 vs V-JEPA 2.196: 5.224
- VAE DiT-S: SSIM = 0.688 vs SigLIP 296: 0.738
- VAE DiT-L: FID = 5.351 (best overall) vs V-JEPA 2.196 DiT-L: 6.186
- VAE DiT-S: OOD distractor SR = 0.287 vs V-JEPA 2.1: 0.575
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2605.06388.

Fig 1: Which latent space makes a better robotic world model?
Fig 2: Action trajectories
Fig 3 (page 2).

Fig 4 (page 2).
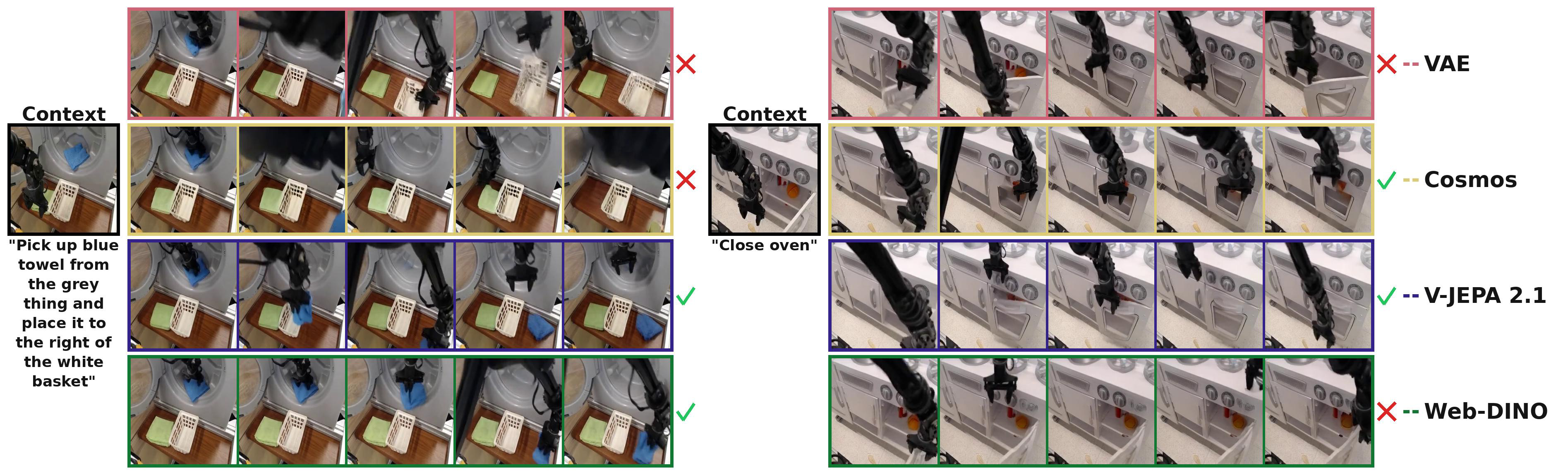
Fig 7: Open-VLA success rate comparison on two random episodes: four frames are sampled at even
Fig 8: The Cohen’s kappa for inter-VLM rater agreement. Given the higher agreement between InternVL
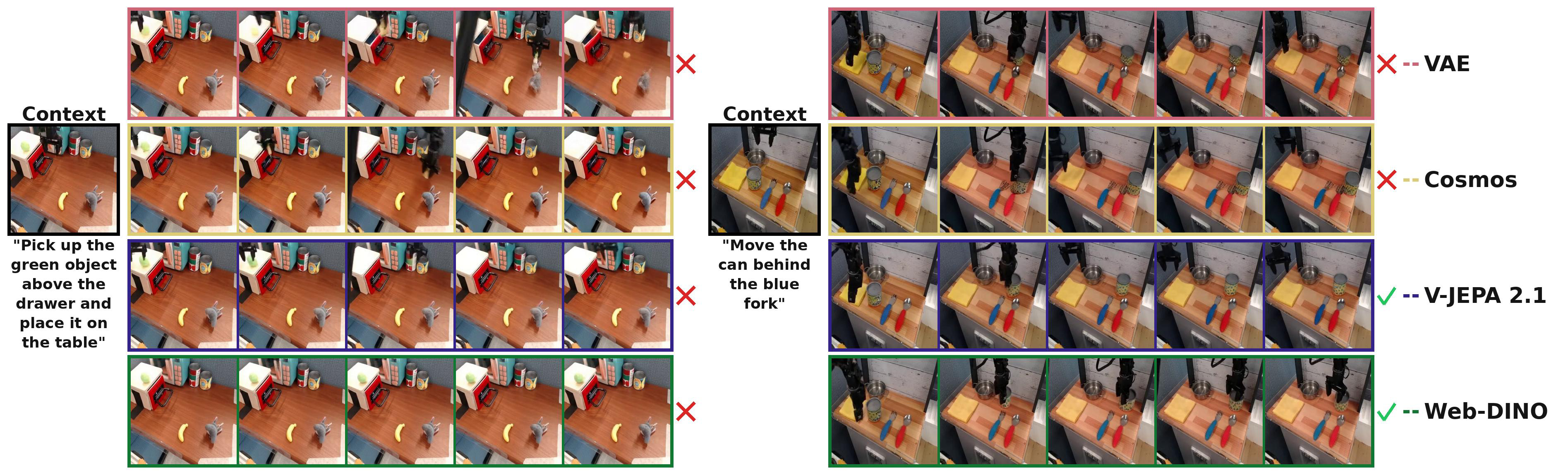
Fig 11: Open-VLA success rate comparison on two random episodes: four frames are sampled at even
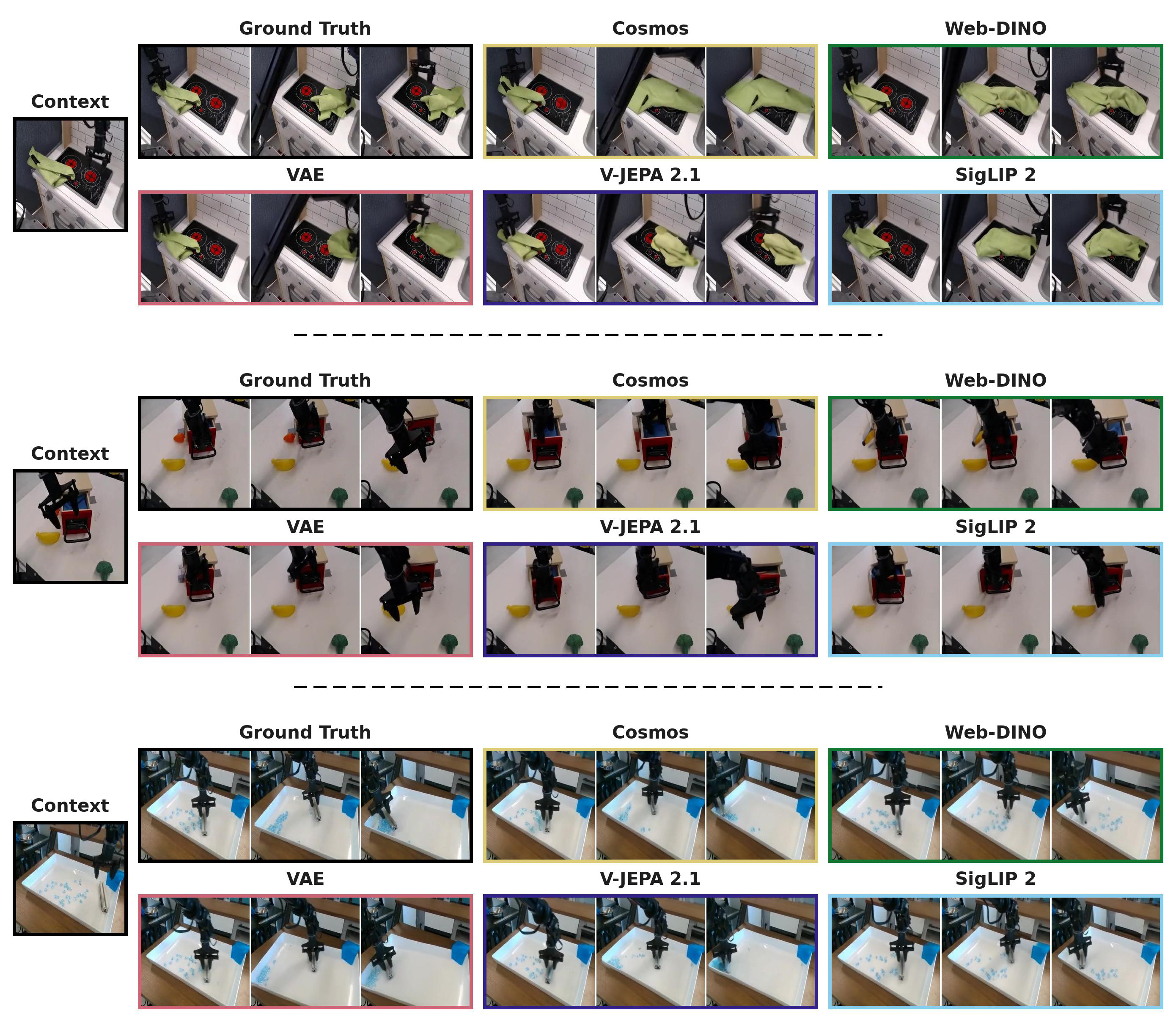
Fig 12: Pixel rollout comparison across models on diverse episodes: the first frame is fed as context
Limitations
- The VLA policy evaluation uses only 20 in-distribution episodes and 10 OOD episodes with 8 trials each — a total of roughly 160–240 rollouts — which is a small sample for measuring consensus success rates with tight confidence intervals; the reported ± values are standard deviations over episodes, not confidence intervals over multiple training runs.
- All experiments use a single robot platform (WidowX 250) and a single dataset (BridgeV2), limiting generalizability to other embodiments, action spaces, or manipulation domains with different visual statistics.
- Language instruction conditioning is explicitly not used during DiT training, removing a potentially important signal for task-conditioned world modeling and making the study less representative of instruction-following deployments.
- The S-VAE adapters are pretrained externally and treated as fixed; the interaction between adapter pretraining objective and the downstream world model training is not ablated — it is unclear whether jointly training the adapter would change the tradeoff findings.
- No real-robot evaluation is performed; all policy performance results are proxies through VLM-judged rollouts inside the world model, and the correlation between VLM success judgments and actual robot task completion is assumed but not validated on this specific benchmark.
- The multi-view scaling experiment finetunes DiT-S for only 20 epochs on a subset of BridgeV2 with three cameras; this is likely an underpowered comparison and the visual quality degradation may be an artifact of insufficient finetuning rather than a structural property of multi-view conditioning.
Open questions / follow-ons
- Does the semantic latent advantage hold for contact-rich tasks beyond manipulation (e.g., dexterous grasping, legged locomotion) where geometric precision may matter more than semantic structure, or is the advantage BridgeV2-specific?
- Can the adapter compression tradeoff (diffusion ease vs. control geometry) be resolved by jointly training the S-VAE adapter with the world model under an action-reconstruction auxiliary loss, rather than using a frozen pretrained adapter?
- The study freezes all encoders; would fine-tuning or adapting the semantic encoder end-to-end on robot data (similar to how VAEs are fine-tuned for domain-specific generation) close the visual fidelity gap while preserving semantic advantages?
- The VLM-based success judge (InternVL + Qwen consensus) is used as a proxy for real-world task success — how well does this proxy correlate with physical robot outcomes across different task families, and what failure modes does it introduce into the evaluation pipeline?
Why it matters for bot defense
This paper is primarily about robotic world models and has no direct application to bot detection or CAPTCHA systems. The core finding — that latent spaces optimized for pixel reconstruction are poor proxies for semantic and behavioral fidelity — has a loose structural analogy to representation learning for behavioral biometrics: embeddings trained on reconstruction objectives (e.g., autoencoders for mouse trajectory compression) may not preserve the action-relevant structure needed for anomaly detection or bot classification, whereas self-supervised semantic representations might. The IDM-based diagnostic (measuring how well latent trajectories preserve action information) could inspire probing tools for behavioral embedding quality in bot detection pipelines.
More concretely, the evaluation methodology — particularly the three-axis framework that separates pixel-level quality, latent structural quality, and downstream task performance — is a useful template for any team evaluating learned representations for sequential decision tasks. A bot-defense engineer building a world-model-style simulator for replay-attack detection or action-prediction-based anomaly scoring might find the CEM planning error and IDM Pearson r metrics directly applicable as proxies for whether a behavioral embedding preserves the temporal structure of human interaction sequences. The finding that visual fidelity metrics can be misleading for downstream task performance is directly transferable to contexts where perceptual quality of a synthetic session replay does not imply behavioral authenticity.
Cite
@article{arxiv2605_06388,
title={ Reconstruction or Semantics? What Makes a Latent Space Useful for Robotic World Models },
author={ Nilaksh and Saurav Jha and Artem Zholus and Sarath Chandar },
journal={arXiv preprint arXiv:2605.06388},
year={ 2026 },
url={https://arxiv.org/abs/2605.06388}
}