
Provably safe and human-like car-following behaviors: Part 2. A parsimonious multi-phase model with projected braking
Source: arXiv:2505.09988 · Published 2025-05-15 · By Wen-Long Jin
TL;DR
This paper addresses the challenge of designing car-following models for automated vehicles that are both provably safe and exhibit human-like driving behaviors, especially under braking scenarios. Existing models like Newell’s, Gipps, and Intelligent Driver Model fail to guarantee collision-free operation with bounded acceleration/deceleration while maintaining realistic human-like trajectories. Building on a prior analysis that revealed these limitations (Part 1), this work introduces a novel multi-phase projection-based car-following model. It mathematically formalizes “projected braking” where a follower vehicle anticipates the leader’s future braking trajectory and plans accordingly. The model integrates an extended Newell’s model for nominal conditions with a new control law for projected braking phases. Using speed-spacing phase plane analysis, the authors provide rigorous proofs that their model satisfies key safety and human-like driving principles such as collision avoidance, bounded acceleration/deceleration, forward travel, and stable stopping distances. Numerical simulations on the stationary lead-vehicle problem validate that the model produces smooth, realistic braking profiles and respects safe stopping distances better than prior attempts. Overall, this parsimonious, multi-phase model offers a theoretically grounded foundation to reconcile safety guarantees with naturalistic driving behavior in automated vehicle trajectory planning.
Key findings
- Extending Newell’s model with simple bounded deceleration violates minimum jam spacing and forward travel principles under braking from high speed.
- The multi-phase projection-based model integrates nominal driving (BDA-Newell) and a novel projected braking control law activating in comfort braking phases.
- Under the assumption follower’s deceleration bound β ≥ leader’s (βL), the model guarantees bounded acceleration −β ≤ a(t) ≤ α and non-negative speed v(t) ≥ 0 (Theorems 4.1 and 4.2).
- The model maintains minimum jam spacing principle z(t) ≥ max{ζ′, Φ′(v(t); vL(t))} across nominal and comfort braking phases without collision (Theorem 4.3).
- In the homogeneous traffic steady state, the model recovers an extended triangular fundamental diagram consistent with real-world traffic (Theorem 4.4).
- Analytical solution of the stationary lead-vehicle problem shows the vehicle decelerates smoothly without exceeding comfort deceleration β; stops at minimum jam spacing ζ′>0 without collision; and satisfies safe stopping distance principle (Theorem 5.1).
- Numerical simulation replicating Treiber et al. (2000) scenario demonstrates acceleration and braking profiles that respect the comfort bounds and converge to safe minimum spacing.
- The model admits sharp acceleration changes (infinite jerk), a limitation noted in braking phase transitions.
Threat model
The adversary is the uncertain future braking behavior of the lead vehicle, which may decelerate suddenly at unknown rates. The follower vehicle’s controller cannot directly influence the leader but must anticipate the leader’s braking profile based on observed current states and bounded assumptions (constant deceleration βL). The model assumes the follower can compute projected trajectories and control acceleration subject to physical comfort bounds, with reaction delay τ′. The adversary cannot violate physical constraints or react faster than the modeled bounds, and the follower does not consider multi-vehicle or lateral maneuvers.
Methodology — deep read
The paper’s methodology is grounded in a rigorous dynamical systems framework combined with physical safety principles and human-like driving objectives. The threat model implicitly assumes that the environment can be uncertain and the follower must anticipate potentially sudden braking by a leader to maintain safety. The adversary here can be viewed as natural lead vehicle braking behavior that the follower must safely respond to.
Data used are not empirical driving traces but rather mathematically defined models of vehicle trajectories parameterized by physics-inspired constants: minimum/comfort jam spacing ζ, ζ′, time gaps τ, reaction time τ′, speed limit μ, and acceleration/deceleration comfort bounds α, β. Parameters are chosen to match typical vehicle and traffic values.
The architecture builds on an extended Newell’s model (the Bounded-Deceleration-and-Acceleration Newell, BDA-Newell) for nominal driving behavior to limit acceleration and deceleration rates during free-flow or comfortable car-following. This base model is combined with a novel projected braking control mechanism activated when spacings fall below comfort jam spacing but remain above minimum jam spacing. This projected braking control law calculates the available braking distance based on anticipated future leader behavior (modeled as constant deceleration βL) and follower reaction time τ′, then outputs acceleration as a nonlinear function a(t) = -v²(t) / (2 * available braking distance). This ensures deceleration is both sufficient yet bounded.
Training here means mathematical proof and parameter setting as opposed to learned weights. The proofs establish that under stated assumptions, the system trajectory remains within defined safe phases, respects speed and spacing constraints, and converges to safe limits without collision. Numerical solutions are implemented via discrete time steps ∆t = 0.001s in simulations matching the stationary lead-vehicle braking problem.
The evaluation protocol is primarily analytical, with theorems proving key safety and boundedness properties, supported by phase plane stability analysis. Additionally, there is a quantitative simulation case study replicating known benchmarks (Treiber et al., 2000), comparing speed, acceleration, and phase trajectories over time and spacing. However, no explicit statistical tests or cross-validation are performed as this is a mathematically grounded model development paper rather than empirical benchmarking.
Reproducibility: The paper does not mention available code or datasets since it deals with theoretical model development and simulation. Key parameters and equations are fully specified, enabling independent reimplementation.
A complete example is the stationary lead-vehicle problem where the leader is stopped (vL(t)=0). Starting with initial follower speed >0 and spacing equal to projected stopping comfort jam spacing, the model’s nonlinear ODEs provide closed-form acceleration as a function of speed, showing smooth braking bounded by comfort limits and no collisions. This illustrates end-to-end model operation from state observation through projected braking and control output.
Overall, the methodology combines rigorous dynamical systems theory, driving behavior principles, and projection of future trajectories to define and prove a multi-phase car-following model that balances safety and human-like realism.
Technical innovations
- Mathematical formalization of projected braking trajectories for leader and follower, allowing anticipation of future braking behavior rather than just static safe distances.
- Definition of novel multi-phase driving states (nominal driving, comfort braking, emergency braking, collision) based on projected braking safety criteria adapting to dynamic leader speeds.
- Integration of an extended Newell’s model for nominal driving with a new control law for projected braking phases guaranteeing bounded deceleration and collision avoidance.
- Rigorous speed-spacing phase plane analysis proving non-negativity of speed, bounded acceleration, preservation of minimum jam spacing, and convergence to safe stopping distance.
- Derivation of a closed-form analytical braking solution for the stationary lead-vehicle problem capturing human-like deceleration profiles under safety guarantees.
Baselines vs proposed
- Standard Newell model with bounded deceleration: violates minimum jam spacing and forward travel under braking vs proposed multi-phase model: provably collision-free with bounded deceleration (Theorems 4.1 - 4.3)
- BDA-Newell alone in comfort braking phase: can produce negative speeds and emergency phase incursions vs multi-phase model: ensures non-negative speeds and no emergency phase transitions
- Numerical simulation matching Treiber et al. (2000) scenario: resulting speed and spacing trajectories converge smoothly to minimum jam spacing with bounded acceleration vs Gipps model (Part 1 study): follower stops truncating at comfort jam spacing instead
Figures from the paper
Figures are reproduced from the source paper for academic discussion. Original copyright: the paper authors. See arXiv:2505.09988.
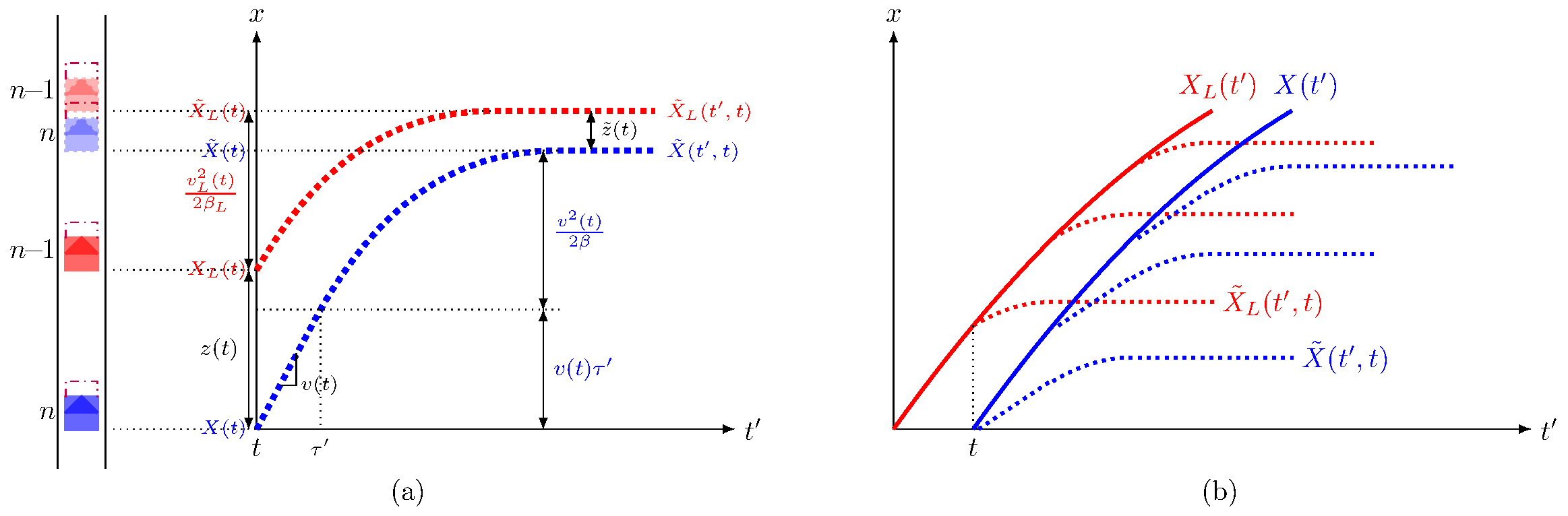
Fig 1: Projected braking lead-vehicle problem
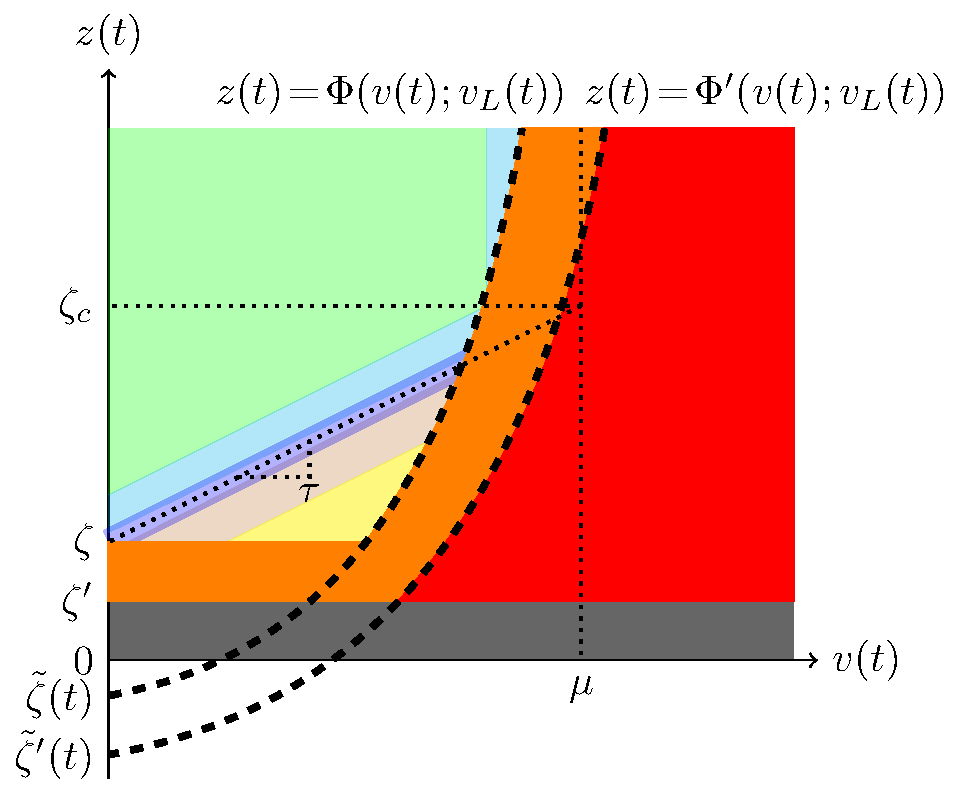
Fig 2: Projection-based phases in the (v(t), z(t)) plane
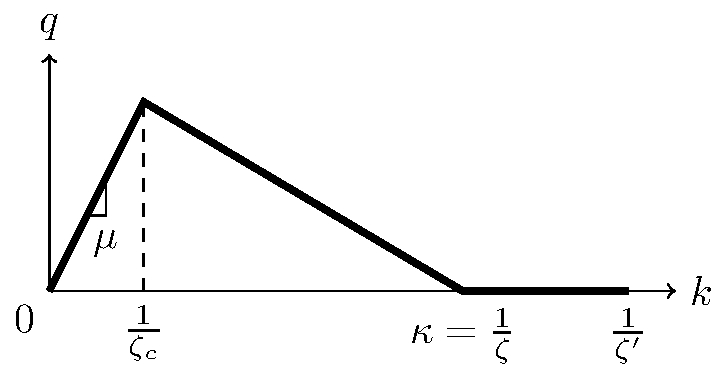
Fig 3: Extended triangular fundamental diagram for the multi-phase projection-based
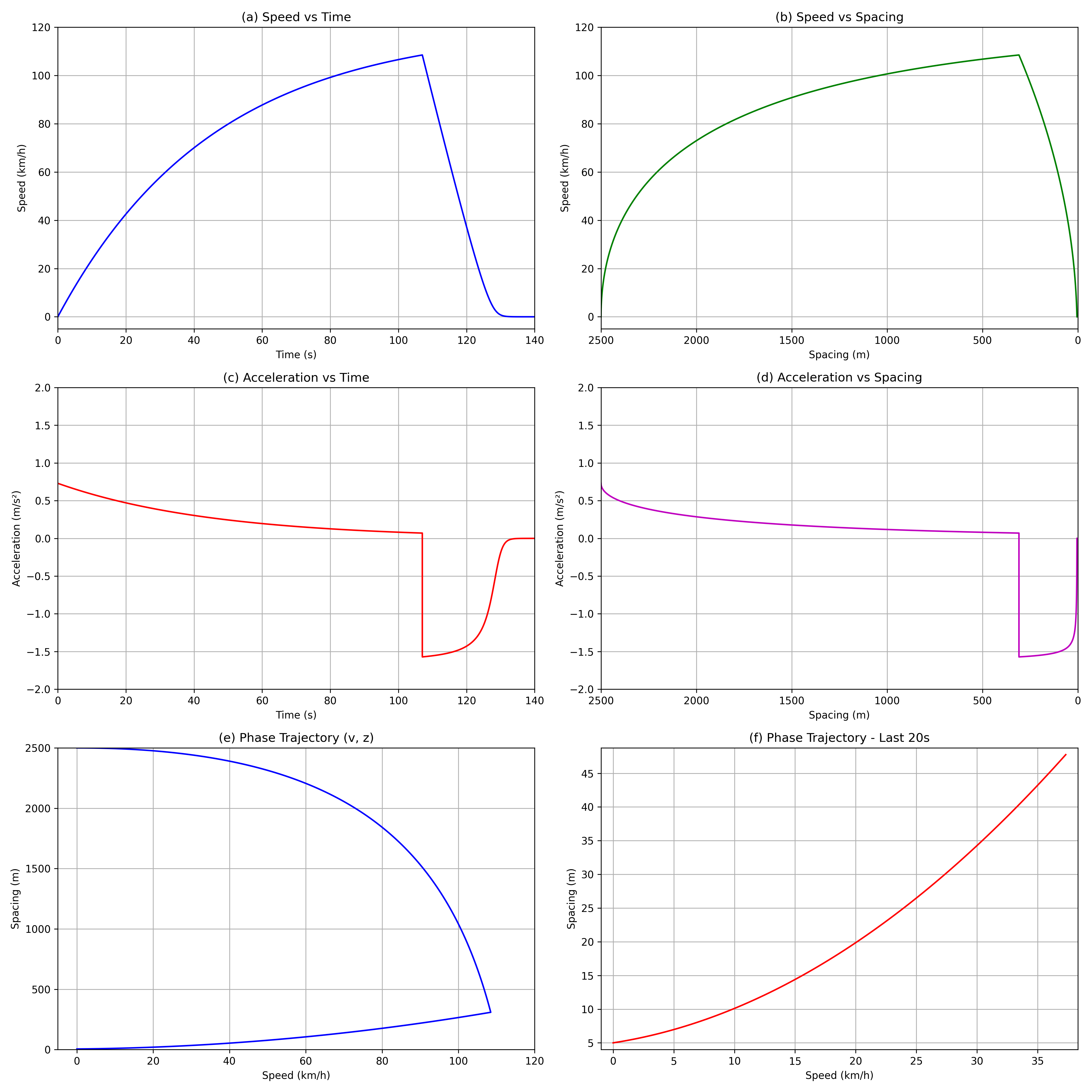
Fig 4: Replication of Figure 2 in (Treiber et al., 2000) with the multi-phase projection-
Limitations
- Projection-based approach requires accurate knowledge or estimation of leader’s deceleration bound βL and reaction time τ′, which may be uncertain or vary.
- Transferability to complex multi-vehicle interactions or mixed traffic with heterogeneous parameters is not addressed.
- No explicit modeling or control of jerk limits results in instantaneous acceleration changes at phase boundaries, which may impact comfort.
- Numerical evaluations are limited to stationary lead-vehicle problem; robustness to noisy or adversarial leader trajectories is not tested.
- No empirical validation on real traffic data or human driver comparisons beyond qualitative rationale.
- The model assumes deterministic leader behavior (constant deceleration βL) which may not hold in real uncertain driving conditions.
Open questions / follow-ons
- How can the projection-based framework be extended to account for stochastic or adversarial leader braking behaviors with uncertainty quantification?
- Can jerk bounds or smooth transition strategies be incorporated to ensure more realistic comfort constraints during phase switches?
- What are the implications and adaptations necessary for applying the model in multi-vehicle platoons or mixed autonomy traffic with varying driver behaviors?
- How does sensor noise, perception delays, or communication latencies impact the projection-based safety guarantees and model robustness?
Why it matters for bot defense
For bot-defense or CAPTCHA practitioners focused on human interaction simulation, this research offers insights into modeling natural, provably safe agent behaviors in dynamic, adversarial environments under physical constraints. The projection-based anticipatory framework exemplifies how to encode long-horizon planning with local execution while rigorously ensuring safety constraints—principles translatable to bot-behavior modeling for system defenses. In CAPTCHA contexts requiring detection of human-like driving or navigation behaviors, the multi-phase approach highlights features to distinguish natural, anticipatory responses from naive or heuristic automation. Additionally, the clear phase distinctions and established bounded acceleration/deceleration envelopes could inspire improved behavioral signatures for bot detection against scripted, unrealistic inputs. However, adaptation would require extending from physical vehicle domains to more interaction-centric challenge-response tasks.
Cite
@article{arxiv2505_09988,
title={ Provably safe and human-like car-following behaviors: Part 2. A parsimonious multi-phase model with projected braking },
author={ Wen-Long Jin },
journal={arXiv preprint arXiv:2505.09988},
year={ 2025 },
url={https://arxiv.org/abs/2505.09988}
}